Project Description
The target is to solve the problem of declining birthrate and aging population, which is one of the social issues. We aim to realize the following items in all industrial fields by using technology that integrates AI, robots, sensors, etc. to cooperate with humans.
- Optimization of labor input resources
- Improvement of employee quality of work
- Creation of new customer value, inheritance of skills and sophistication in anticipation of changes in the industrial structure
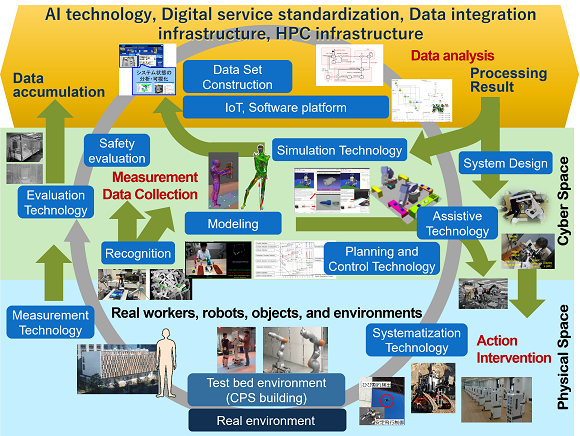
We improve the technology of modeling, planning / control, system design, etc. for systems consisting of workers, sensors, robots, equipment, work environment, etc. in the manufacturing or service industry. By utilizing AI that cooperates with humans, we develop and demonstrate technology that optimizes from the viewpoint of workability and productivity while maintaining the safety and flexibility of the system. In order to develop new technologies in the real area, we have established a testbed environment in the Cyber Physical System research building at the AIST Tokyo Waterfront, including the factory environment in the manufacturing field and the retail store environment in the logistics field, and are promoting industry-academia-government collaboration activities through collaborative research and consortium partnerships.
PI
Fumio KanehiroPeriod
2020.4-2025.3Funded by
AISTRelated Publications (including JRL contributions)
| Title | Authors | Conference/Book | Year | bib | |
| Scalable, Training-Free Visual Language Robotics: A Modular Multi-Model Framework for Consumer-Grade GPUs | M. Samson, B. Muraccioli, F. Kanehiro | IEEE/SICE International Symposium on System Integration | 2025 | ||
| A Lightweight Approach to Efficient Multimodal 2D Navigation and Mapping: Unified Laser-Scans As an Alternative to 3D Methods | O. Noel, R. Cisneros-Limón, K. Kaneko, F. Kanehiro | IEEE/SICE International Symposium on System Integration | 2025 | ||
| Learning to Classify Surface Roughness Using Tactile Force Sensors | Y. Houhou, R. Cisneros-Limón, R. Singh | IEEE/SICE International Symposium on System Integration | 2024 | ||
| Learning and Generalizing Tasks on Humanoid Robots with an Automatic Multisensory Segmentation Method | V. Barberteguy, F. Kanehiro | IEEE/SICE International Symposium on System Integration | 2024 | ||
| Towards Retail Stores Automation: 6-DOF Pose Estimation Combining Deep Learning Object Detection and Dense Depth Alignment | V. Foussereau, I. Kumagai, G. Caron | IEEE/SICE International Symposium on System Integration | 2024 | ||
| Reachability Based Trajectory Generation Combining Global Graph Search in Task Space and Local Optimization in Configuration Space | I. Kumagai, M. Murooka, M. Morisawa, F. Kanehiro | IEEE/RSJ International Conference on Intelligent Robots and Systems | 2022 |