Project Description
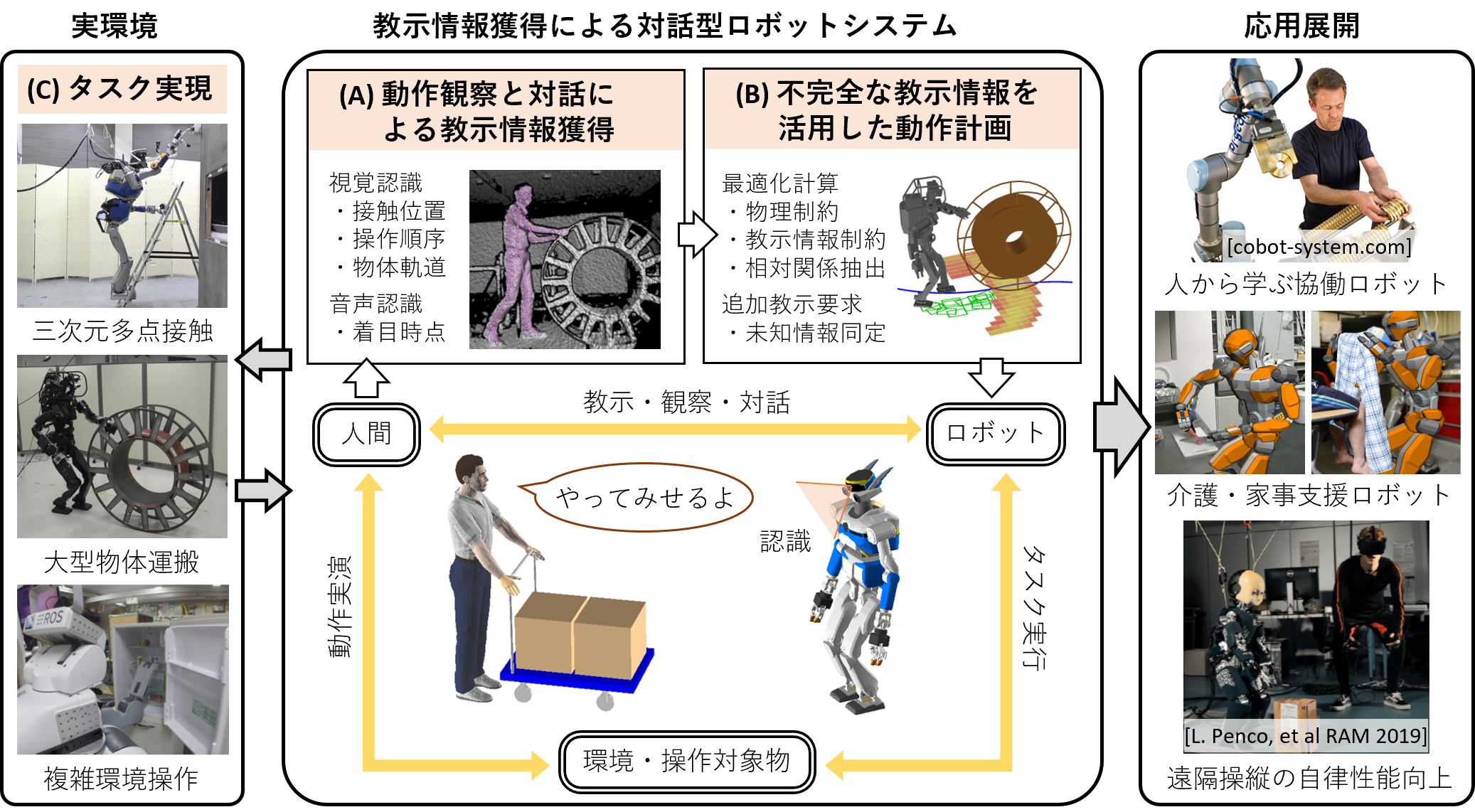
We aim to build a robotic system that enables humanoid robots and mobile manipulators to perform tasks that are difficult to execute fully autonomously with conventional planning methods by making complementary use of human teaching through demonstrations, gestures, and speech. In planning methods based on search and optimization, on-site human teaching of task-specific unknown information or information that requires exploration time enables the robot to immediately adapt to a new task and realize its behavior without the need for software modification.
PI
Masaki MurookaPeriod
2022.4-2025.3Funded by
JSPS Grant-in-Aid for Early-Career ScientistsRelated Publications (including JRL contributions)
| Title | Authors | Conference/Book | Year | bib |