概要
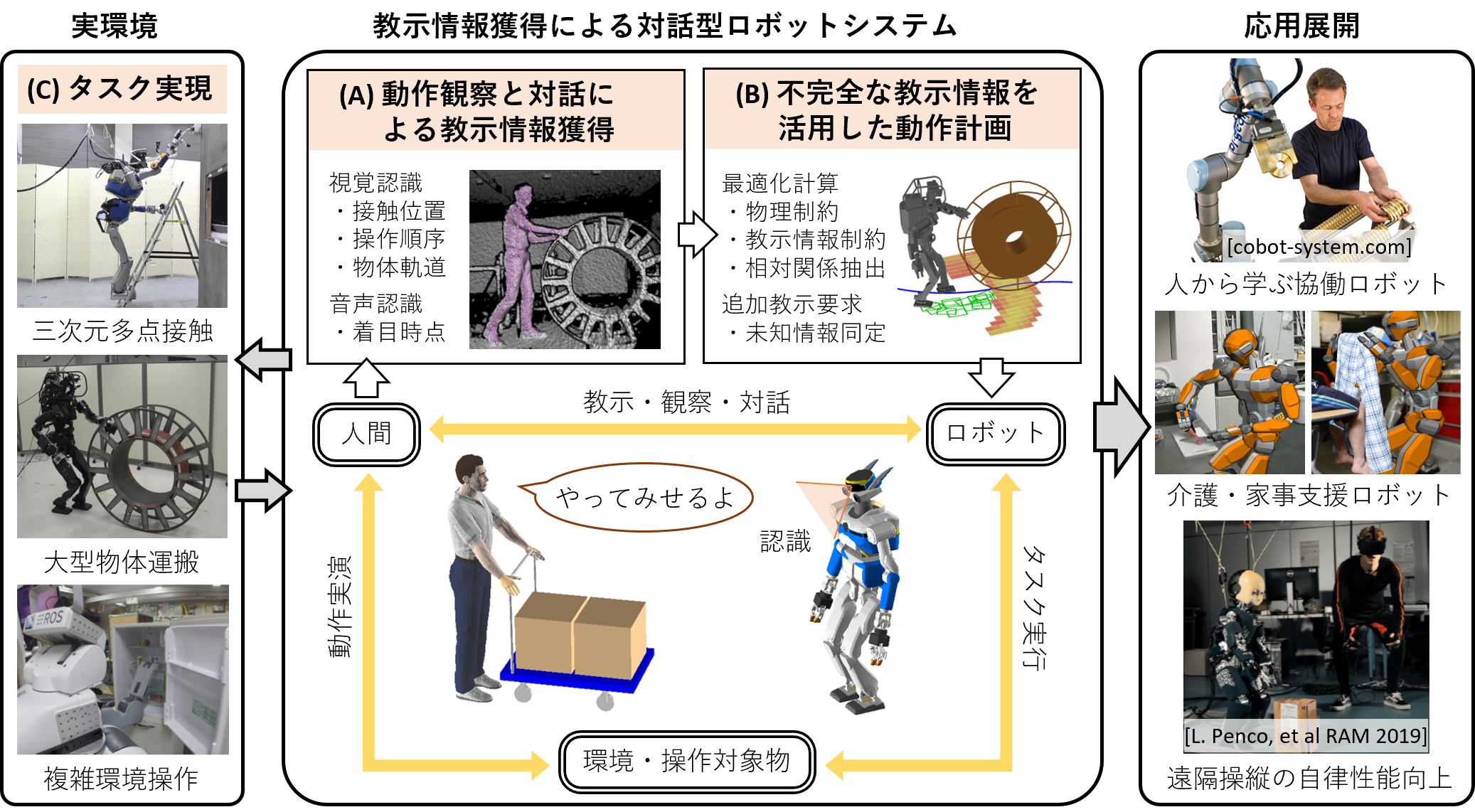
人型ロボットや移動型マニピュレータが、複雑環境三次元移動、大型物体運搬、複雑組み立て作業などの従来の計画手法では完全自律実行の困難であったタスクを、人間による実演・身振り・発話による教示を補完的に活用することで実現するためのロボットシステムを構築する。探索・最適化に基づいた計画手法において、タスク固有の未知情報や探索に時間を要する情報を人間がオンサイトで教示することで、ソフトウェアの変更を必要とせずに、ロボットが新しいタスクに即座に適応し動作を実現することを可能とする。
PI
Masaki Murooka実施期間
2022.4-2025.3資金提供
日本学術振興会 科学研究費助成事業(科研費) 若手研究発表論文
| タイトル | 著者 | 学会/論文誌 | 年 | bib |