概要
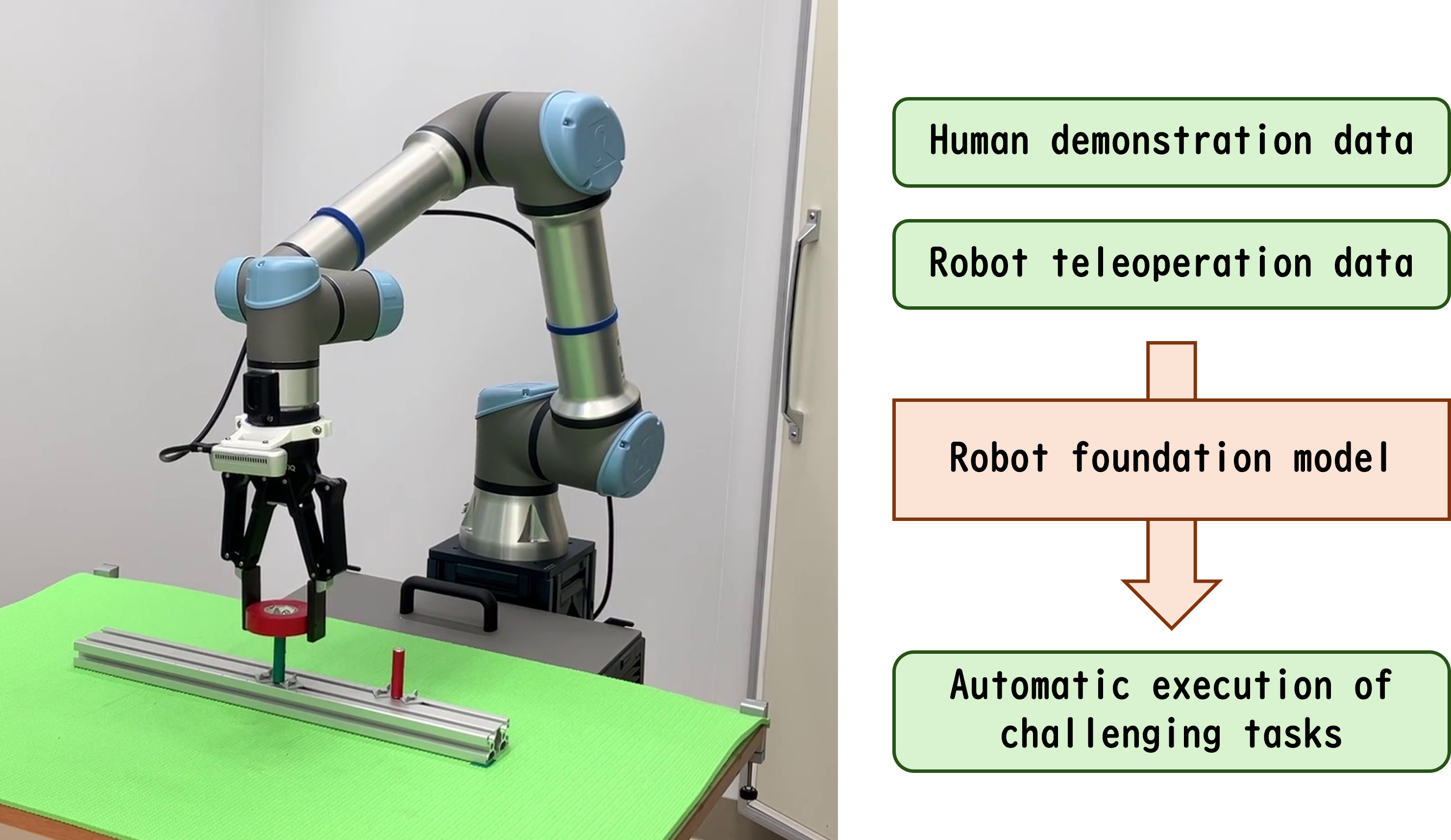
言語・画像・音響・三次元点群等の多様なモダリティのAI基盤モデルを開発し統合することでロボットの実世界における動作計画・制御を可能とするロボット基盤モデルを構築することを目指す。AIST-CNRSロボット工学連携研究ラボでは、インダストリアルCPS研究センターや人工知能研究センターと協力しながら、センサ計測に応じた繊細なロボットの運動が必要となる難易度の高いマニピュレーションタスクをデータドリブンに実現可能な模倣学習の開発を通してロボット基盤モデルの構築に取り組んでいる。
PI
Masaki Murooka実施期間
2024.4-2027.3資金提供
AIST発表論文
| タイトル | 著者 | 学会/論文誌 | 年 | bib |