概要
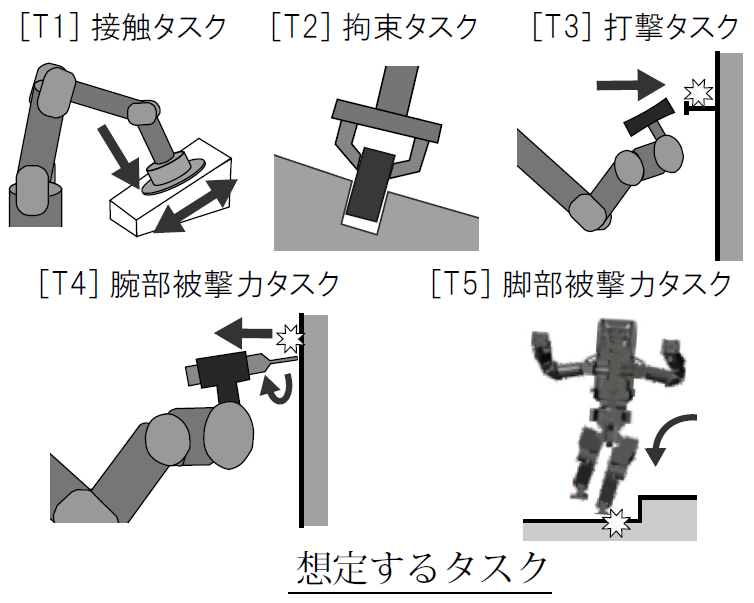
今日の産業用ロボット機器の多くは専用のサーボアンプで制御されており,上位コントローラからの位置指令(あるいは速度指令)にもとづいて動作する.接触力を操作する用途においては,力センサや外力オブザーバからの情報にもとづいて位置指令を修正するアドミッタンス制御とよばれる手法がよく用いられる.このため,多くの産業用メカトロニクス機器は,力入力・位置出力型の「アドミッタンス型」であるといえる.これらの機器は技術的にもコスト的にも成熟しているが,接触・非接触が頻繁に変化する状況,特に,過大な力や撃力が加わりうる状況に不向きである.本研究課題では,産業用ロボットや人型ロボットの既存のハードウェアを対象として,過荷重や撃力が加わる際の力制御の戦略を確立する.この目的のために,状態量や制御入力の飽和を陽に扱える非平滑制御則の枠組みを活用する.
PI
Rafael Cisneros-Limón実施期間
2024.4-2027.3資金提供
日本学術振興会 科学研究費助成事業(科研費) 基盤研究(B)発表論文
| タイトル | 著者 | 学会/論文誌 | 年 | bib |
