概要
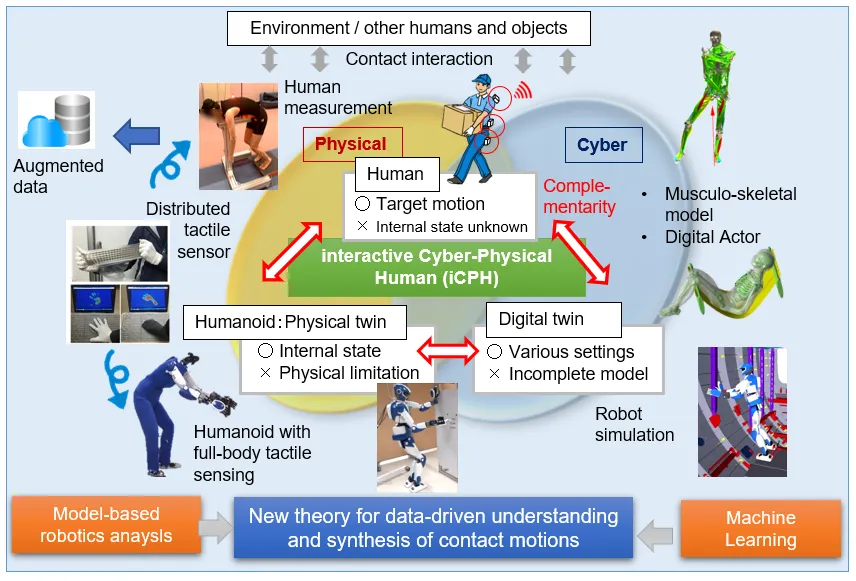
接触こそが人型システムの運動記述の鍵であるとの新視点から、接触運動の継続学習・予測・生成を行う統一的な方法論の確立を目指す。人は環境と接触を伴う運動を自然に行うのに対し、その機序の解明や工学的利用に関する未解決課題は多い。それへの挑戦の一環として、申請者らは解析微分により人型システムの運動理解・最適化を行う革新的な理論基盤を構築してきた。本課題では、新たに ①サイバーフィジカルヒューマン(シミュレーション・実世界の人間・ロボット統合モデル)によるデータ取得・拡張の枠組と接触運動の一般的表現の提案、②運動逆最適化に基づく接触運動ネットワークの継続学習とデータベース構築、③逆予見制御とベクトル量子化学習の融合によるシンボル体系化と予測に包括的に取り組み、接触を伴う任意の運動の理解と生成に挑む。データベース公開により内外機関と連携を推進するとともに、分布型衣服埋め込みセンサによる作業者負担の実時間モニタリング、ロボットと人の遠隔協調による重量物運搬・組付け作業など、各種産業での生産性やQoWの向上にインパクトをもたらす実問題で成果を検証し、複雑な人の運動を予測し自然に支援するシステムを創出する。
PI
Mitsuharu Morisawa実施期間
2022.4-2027.3資金提供
日本学術振興会 科学研究費助成事業(科研費) 基盤研究(S)発表論文
| タイトル | 著者 | 学会/論文誌 | 年 | bib | |
| Whole-Body Multi-Contact Motion Control for Humanoid Robots Based on Distributed Tactile Sensors | M. Murooka, K. Fukumitsu, M. Hamze, M. Morisawa, H. Kaminaga, F. Kanehiro, E. Yoshida | IEEE Robotics and Automation Letters | 2024 | ||
| Measuring and Analyzing Human Wide-Area Contact Motion Using Tactile Sensors | S. Wang, Ko Ayusawa, E. Yoshida | IEEE-RAS International Conference on Humanoid Robots | 2024 | ||
| Robust Humanoid Walking on Compliant and Uneven Terrain with Deep Reinforcement Learning | R. Singh, M. Morisawa, M. Benallegue, Z. Xie, F. Kanehiro | IEEE-RAS International Conference on Humanoid Robots | 2024 | ||
| Contacts from Motion: Learning Discrete Features for Automatic Contact Detection and Estimation from Human Movements | H. Miyake, Ko Ayusawa, R. Sagawa, E. Yoshida | IEEE/RSJ International Conference on Intelligent Robots and Systems | 2024 |
