Project Description
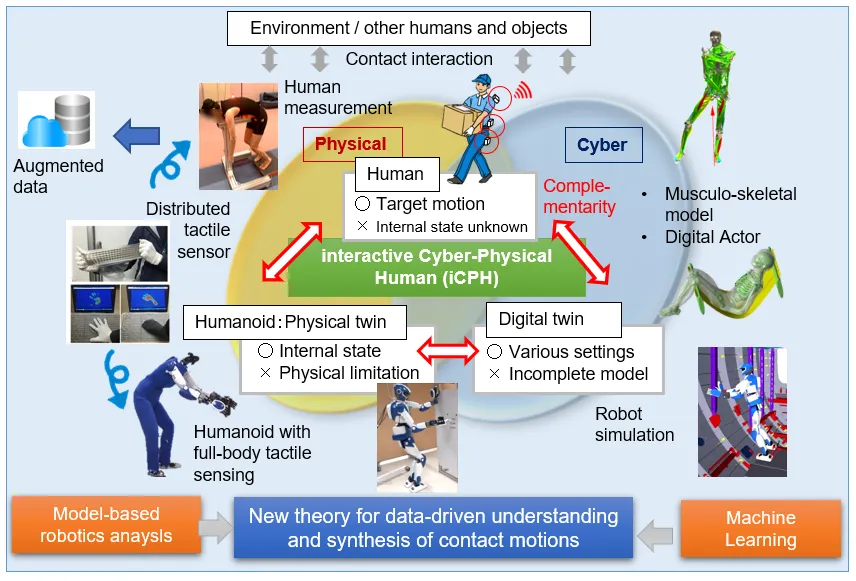
ulo-skeletal systems have been developed. Placing human measurement and model-based robotic approaches as an important basis, our challenge is to overcome this difficulty also by exploiting a powerful machine learning framework to benefit from a large dataset of human motions. Consequently, we can take advantage of humanoids’ ability to interact with the physical world to refine and validate the model of the motion strategy and controller, as well as digital actors’ flexibility to change many parameters to simulate and learn motions with various shapes, dimensions, and physical models in different environments. Then, we hope to come up with a system that predicts and synthesizes human motions, notably motions involving complex contacts, in a variety of environments. As the cyber-physical human evolves, we expect it can be utilized to design ergonomic products, create robots that can support human comfortably by estimating human intention, and devise a humanoid robot that can coexist with humans naturally and safely in their proximity.
PI
Mitsuharu MorisawaPeriod
2022.4-2027.3Funded by
JSPS Grant-in-Aid for Scientific Research (S)Related Publications (including JRL contributions)
| Title | Authors | Conference/Book | Year | bib | |
| Whole-Body Multi-Contact Motion Control for Humanoid Robots Based on Distributed Tactile Sensors | M. Murooka, K. Fukumitsu, M. Hamze, M. Morisawa, H. Kaminaga, F. Kanehiro, E. Yoshida | IEEE Robotics and Automation Letters | 2024 | ||
| Measuring and Analyzing Human Wide-Area Contact Motion Using Tactile Sensors | S. Wang, Ko Ayusawa, E. Yoshida | IEEE-RAS International Conference on Humanoid Robots | 2024 | ||
| Robust Humanoid Walking on Compliant and Uneven Terrain with Deep Reinforcement Learning | R. Singh, M. Morisawa, M. Benallegue, Z. Xie, F. Kanehiro | IEEE-RAS International Conference on Humanoid Robots | 2024 | ||
| Contacts from Motion: Learning Discrete Features for Automatic Contact Detection and Estimation from Human Movements | H. Miyake, Ko Ayusawa, R. Sagawa, E. Yoshida | IEEE/RSJ International Conference on Intelligent Robots and Systems | 2024 |
