Project Description
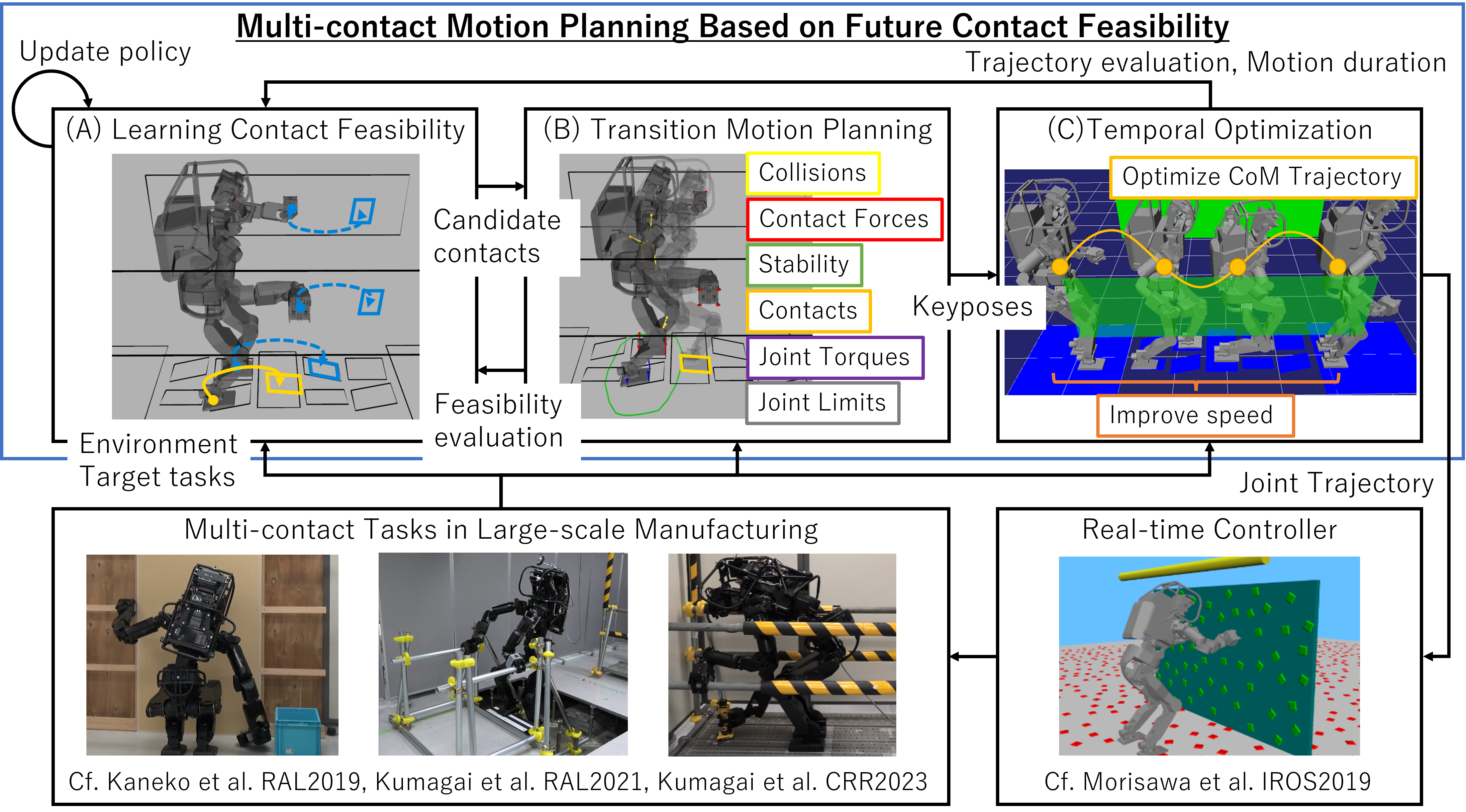
The goal of this project is to develop a framework to plan multi-contact motion for a humanoid robot to perform complex tasks such as those done by human workers in large-scale manufacturing. To achieve this goal, we need to efficiently find feasible contacts from an infinite number of candidates in a confined environment. We solve this issue by focusing on future contact feasibility, which quantitatively represents how much it improves the solvability of the optimization problems for motion planning and the quality of the resulting motion. We introduce the reinforcement learning approach to predict it over the future and integrate it with optimization-based motion planning that explicitly considers the kinematics and dynamics of a humanoid robot, which enables us to generate feasible whole-body motion that is advantageous to satisfy necessary constraints over the future. We consider that this research will clarify how a humanoid robot obtains empirical intelligence to interact with an environment considering the tasks and its body structures.
PI
Iori KumagaiPeriod
2023.4-2026.3Funded by
JSPS Grant-in-Aid for Early-Career ScientistsRelated Publications (including JRL contributions)
| Title | Authors | Conference/Book | Year | bib | |
| Reinforcement Learning of Contact Preferability in Multi-contact Locomotion Planning for Humanoids | I. Kumagai, M. Murooka, M. Morisawa, F. Kanehiro | IEEE Robotics and Automation Letters | 2025 | ||
| Multi-Contact Activities by Humanoids | I. Kumagai | Current Robotics Reports | 2023 |