Project Description
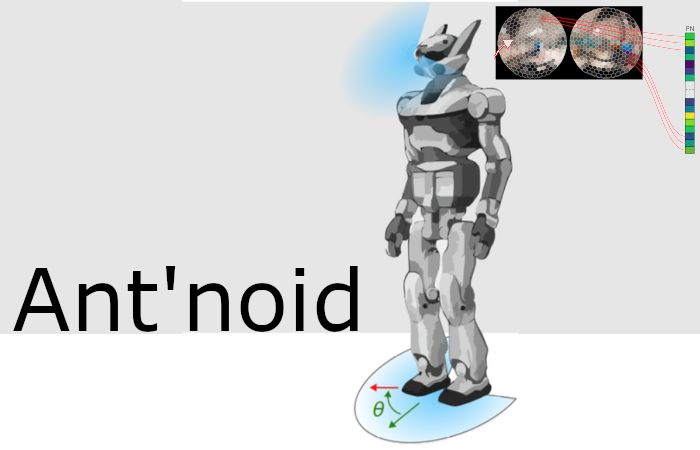
Ant'noid is a collaborative project funded by ANR (Agence Nationale de la Recherche / French national research agency). In this project led by CNRS-AIST JRL, we've partnered with CNRS-Aix-Marseille University Institute of Movement Science. The aim is to leverage the knowledge on desert ants' visual familiarity capabilities to make a humanoid robot navigate both in bidimensional and tridimensional spaces with an extremely low memory usage from full-spherical visual perception. This project emerges from an International Emerging Action funded by CNRS.
Ant'noid will be implemented on small size and human adult size humanoids such as HRP-5P.
PI
Guillaume CaronPeriod
2024-2028Funded by
ANRRelated Publications (including JRL contributions)
| Title | Authors | Conference/Book | Year | bib |