Project Description
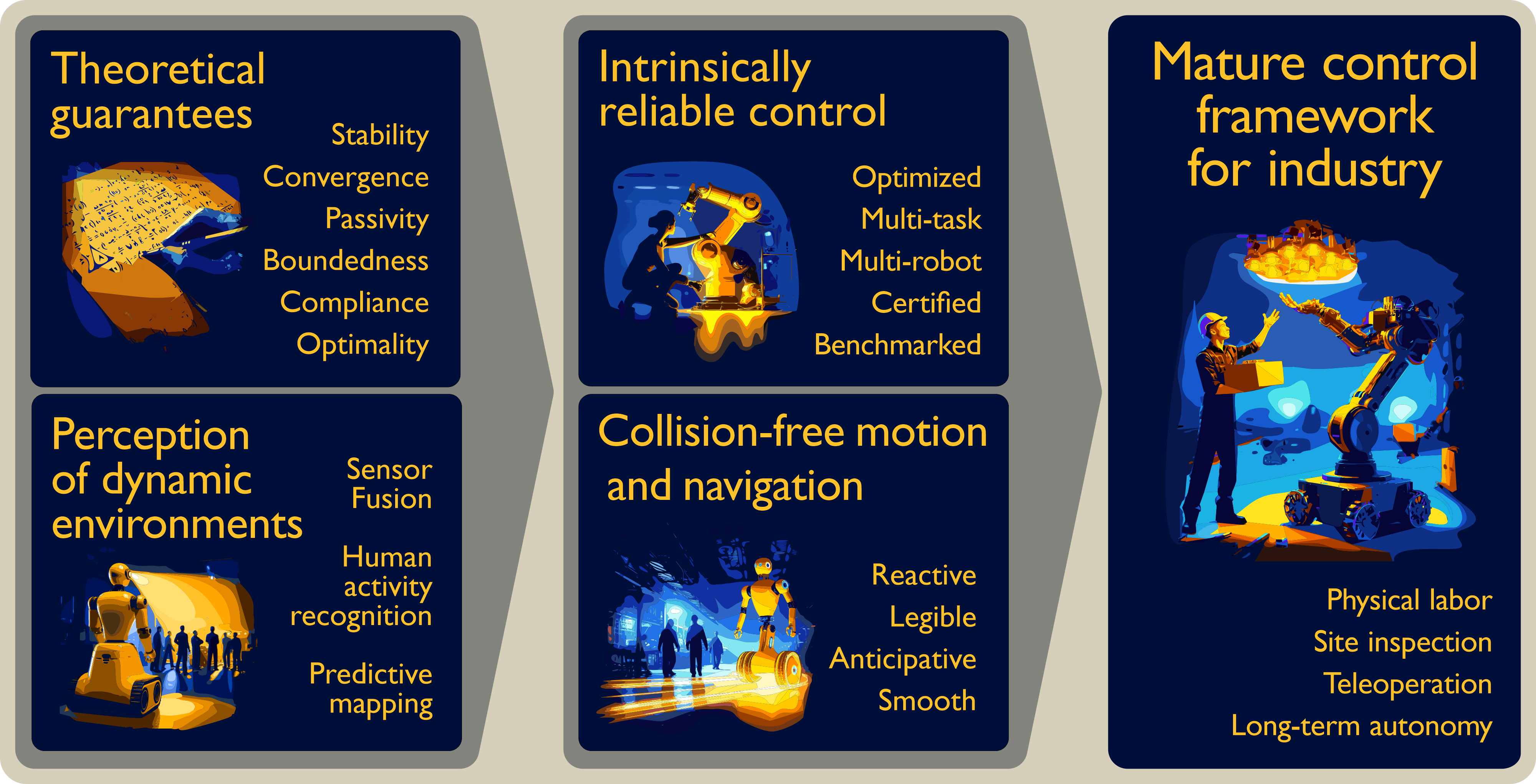
This study aims to bridge the gap between precise yet dangerous industrial robots and safer but less efficient collaboration counterparts by developing a unified advanced control and navigation framework. We aim to integrate this research into our existing mc_rtc control environment, building on our current control system used for various robots and tasks. Inspired by the need for industry certifications, our focus is on creating a complete system that enables robots to move and navigate more autonomously and safely in dynamic environments, including around humans. The foundation of this framework relies on theoretical guarantees of stability and convergence provided by control theory, those of optimality and performance provided by numerical optimization techniques, and the reliability provided by sensor fusion. We propose also to establish systematic benchmarking on actual robotic platforms. Finally, we aim for actual industrial applications in physical tasks and improved robot autonomy. The target robots are any multi-body robot (fixed and mobile manipulators, legged robots, etc.)
PI
Mehdi BenalleguePeriod
2023.11-2026.3Related Publications (including JRL contributions)
| Title | Authors | Conference/Book | Year | bib |