概要
社会課題の一つである少子高齢化問題の解決をターゲットと定め、サービス業を含む全ての産業分野で労働等の投入資源の最適化、従業員のQuality of Work(QoW)の向上、産業構造の変化を先取する新たな顧客価値の創出、技能の継承・高度化に向けて、人と協調する人工知能(AI)、ロボット、センサ(IoT)等を融合した技術を開発することを目標としています。
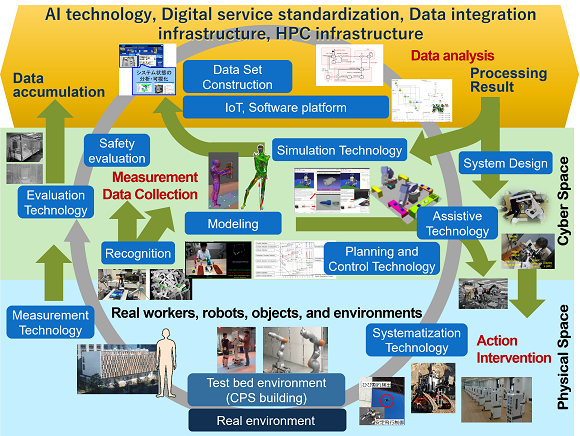
本研究センターでは特に、製造業やサービス業等の現場における人、センシング、ロボット、機器、作業環境等から構成されるシステムに関して、サイバーフィジカルシステム(CPS)を基盤として、モデリング、計画・制御、システム設計等の技術を高度化・統合化するとともに、人と協調するAIを活用することにより、当該システムの安全性と柔軟性を保ちつつ作業性や生産性の観点から最適化する技術を開発し実証します。加えて、実現場での展開を目指す上で、臨海副都心センターCPS研究棟内に新たな技術を試すことを可能とするテストベッド環境として製造分野における工場環境、物流分野における小売店舗環境等を構築しており、共同研究、コンソーシアム連携による産学官連携活動を推進しています。
PI
Fumio Kanehiro実施期間
2020.4-2025.3資金提供
AIST発表論文
| タイトル | 著者 | 学会/論文誌 | 年 | bib | |
| Scalable, Training-Free Visual Language Robotics: A Modular Multi-Model Framework for Consumer-Grade GPUs | M. Samson, B. Muraccioli, F. Kanehiro | IEEE/SICE International Symposium on System Integration | 2025 | ||
| A Lightweight Approach to Efficient Multimodal 2D Navigation and Mapping: Unified Laser-Scans As an Alternative to 3D Methods | O. Noel, R. Cisneros-Limón, K. Kaneko, F. Kanehiro | IEEE/SICE International Symposium on System Integration | 2025 | ||
| Learning to Classify Surface Roughness Using Tactile Force Sensors | Y. Houhou, R. Cisneros-Limón, R. Singh | IEEE/SICE International Symposium on System Integration | 2024 | ||
| Learning and Generalizing Tasks on Humanoid Robots with an Automatic Multisensory Segmentation Method | V. Barberteguy, F. Kanehiro | IEEE/SICE International Symposium on System Integration | 2024 | ||
| Towards Retail Stores Automation: 6-DOF Pose Estimation Combining Deep Learning Object Detection and Dense Depth Alignment | V. Foussereau, I. Kumagai, G. Caron | IEEE/SICE International Symposium on System Integration | 2024 | ||
| Reachability Based Trajectory Generation Combining Global Graph Search in Task Space and Local Optimization in Configuration Space | I. Kumagai, M. Murooka, M. Morisawa, F. Kanehiro | IEEE/RSJ International Conference on Intelligent Robots and Systems | 2022 |