
研究テーマ
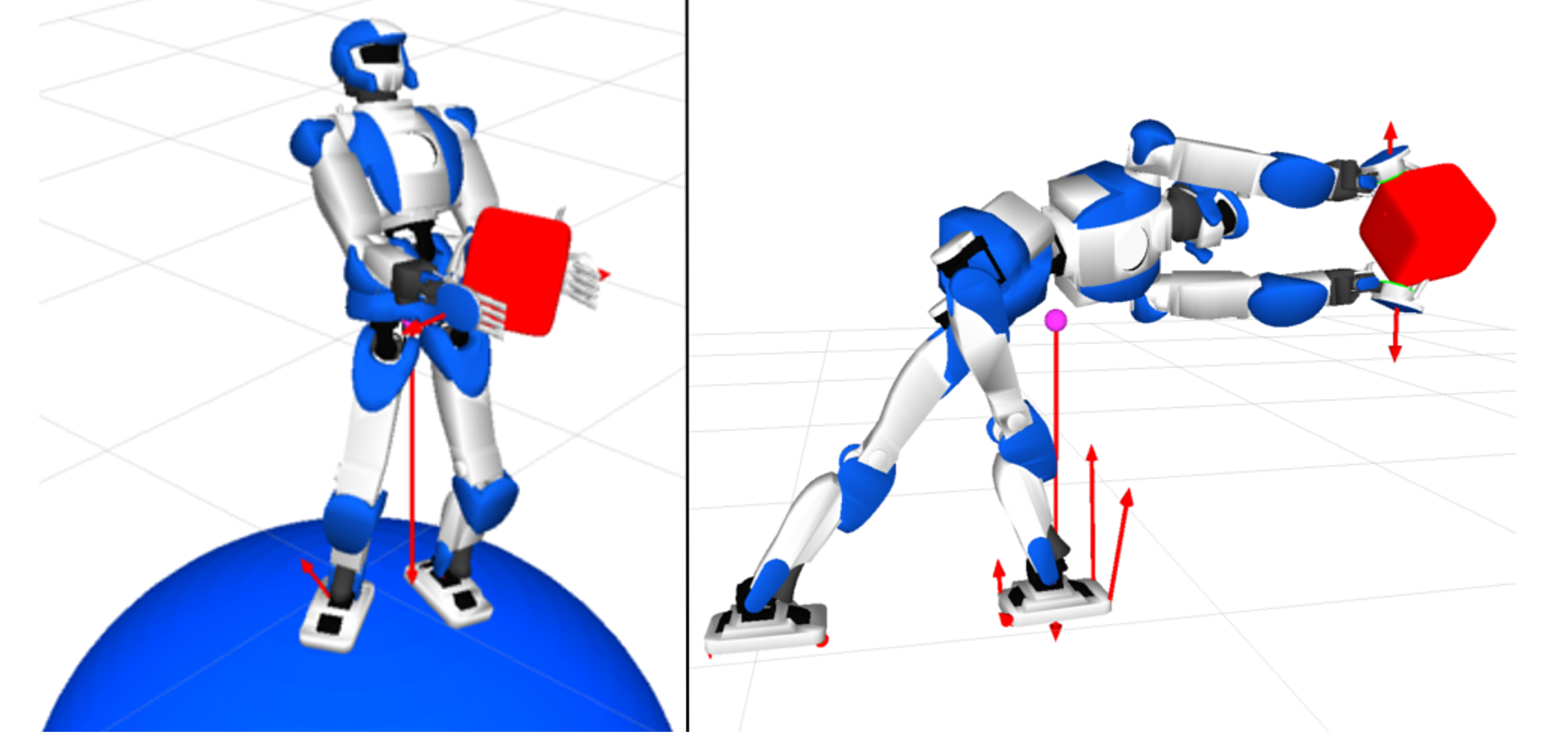
- Full-body posture generation (generalized inverse kinematics)
- Development of a dedicated nonlinear optimization solver specialized for robotics problems
- Description and resolution of robotics problems on non-Euclidean manifolds
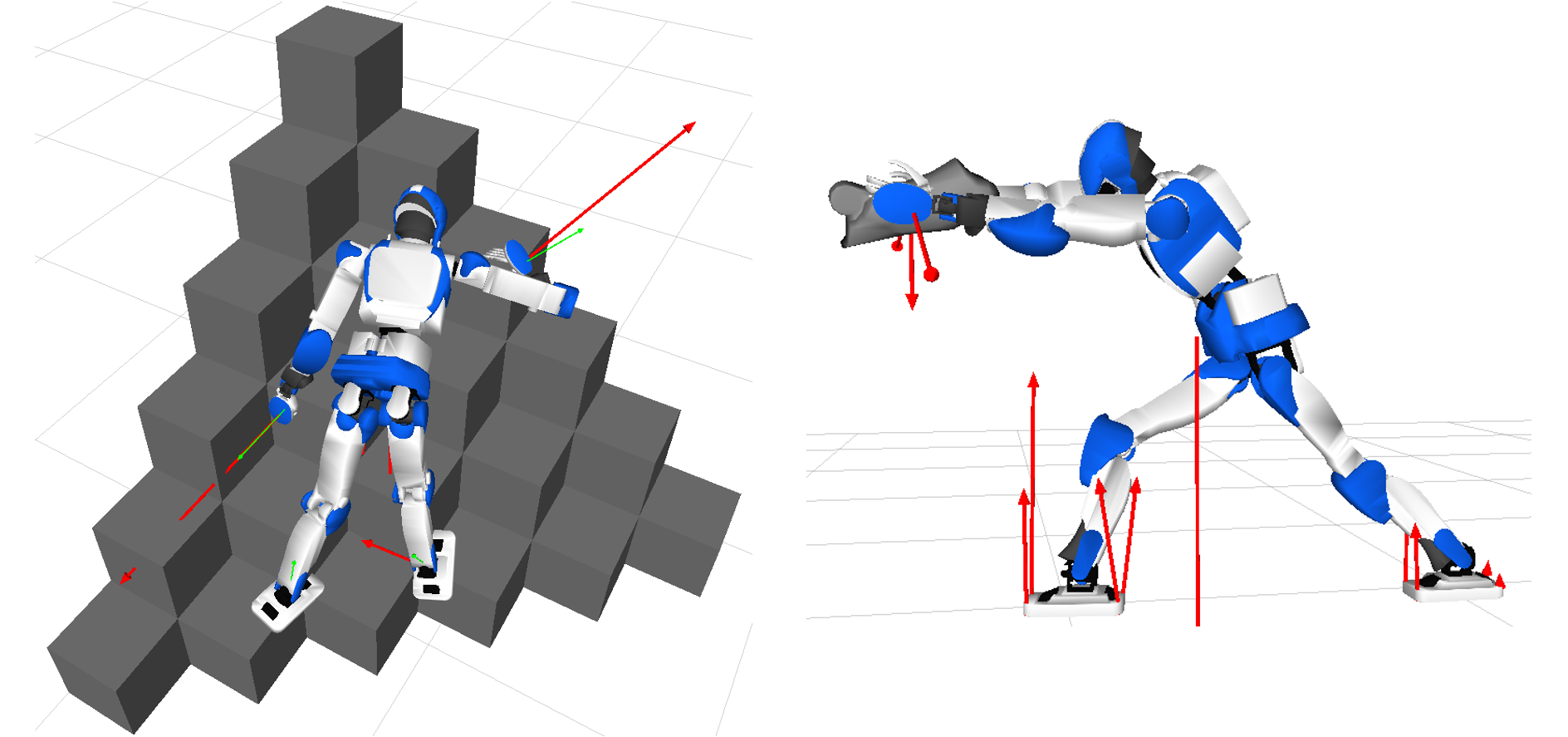
- Autonomous choice of contact points on complex surfaces

論文
論文リストは完全ではない場合があります。特に2017年以前の論文については、更新作業を進めています。
| タイトル | 著者 | 学会/論文誌 | 年 | bib | |
| Multi-Contact postures computation on Manifolds | S. Brossette, A. Escande, A. Kheddar | IEEE Transactions on Robotics | 2018 | ||
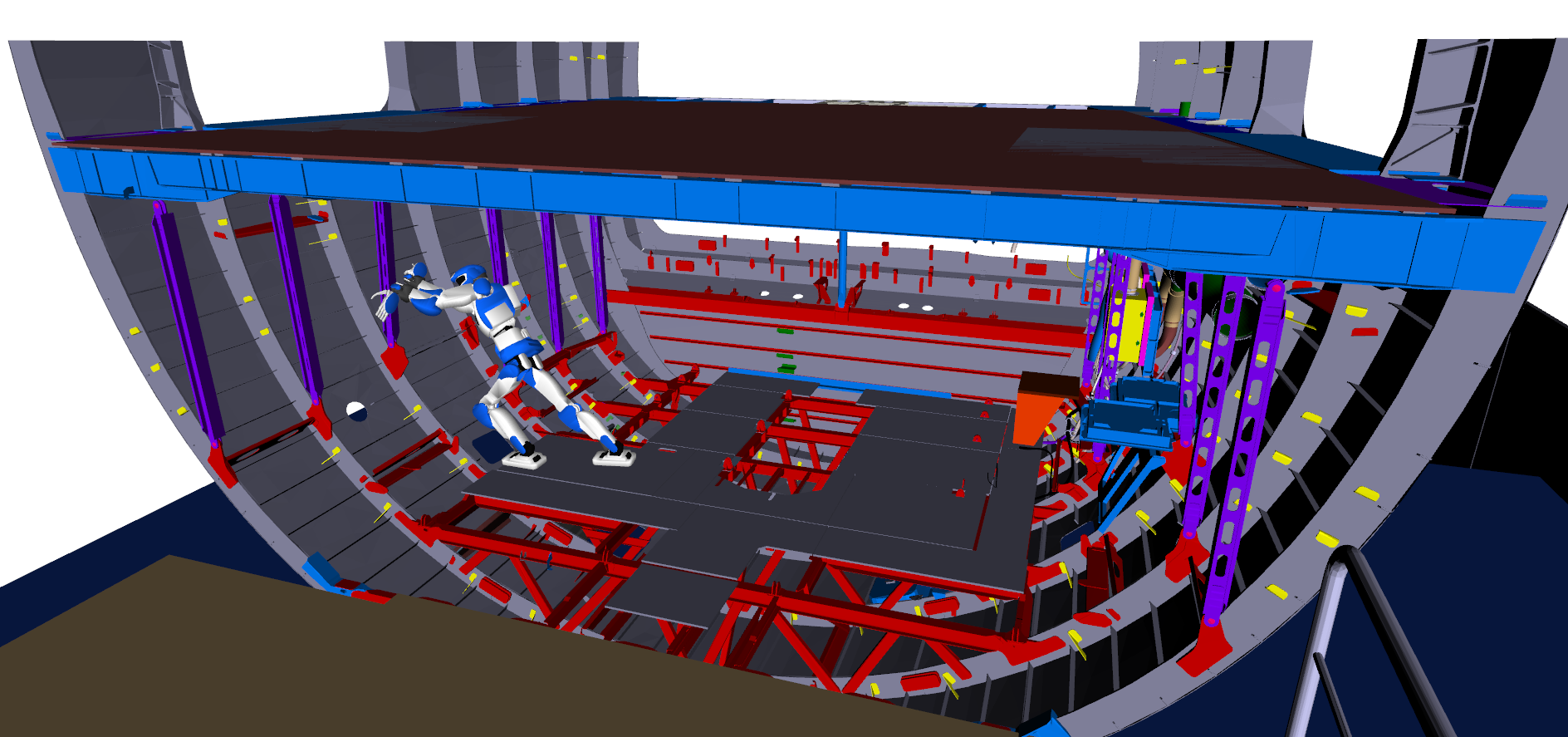
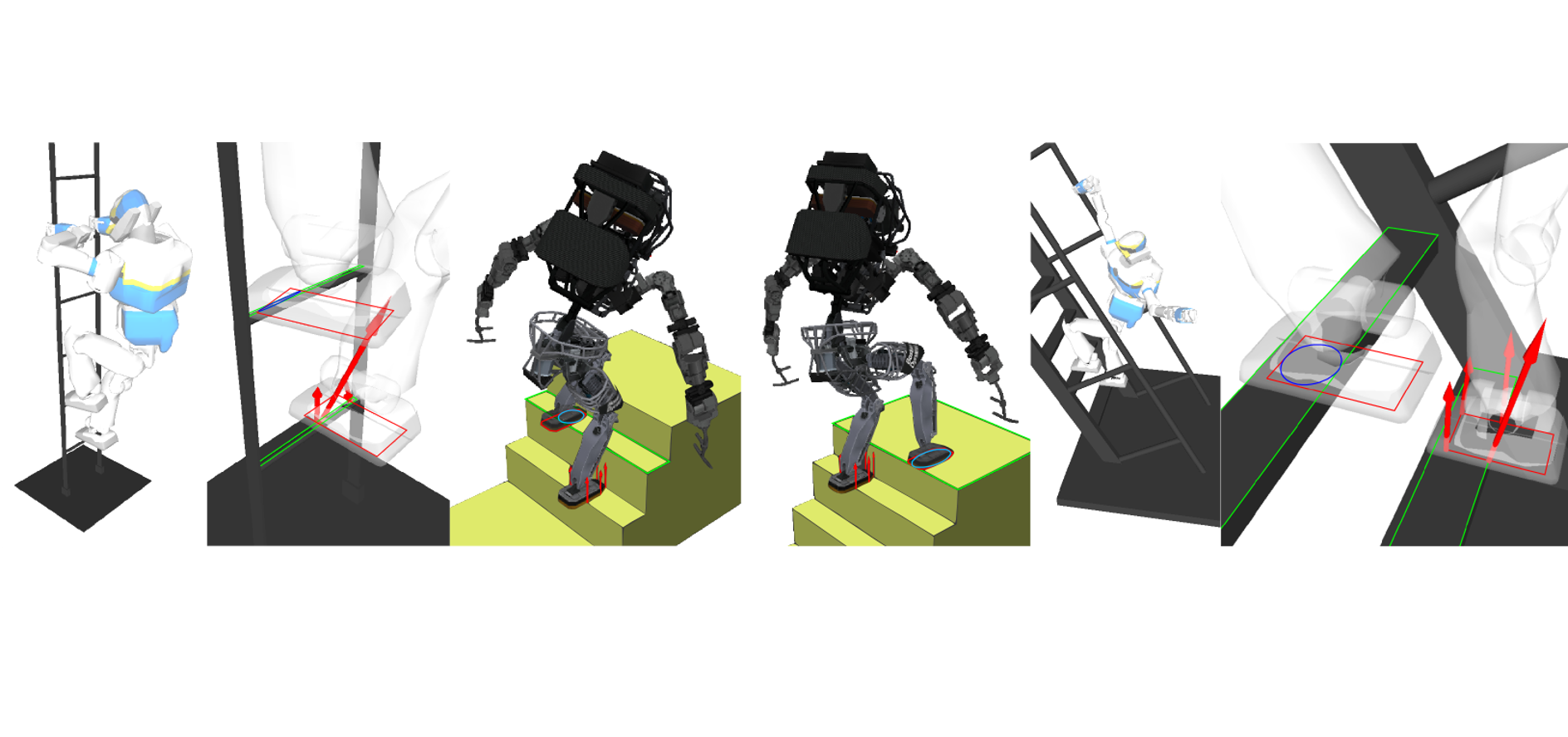
| Multi-Contact Vertical Ladder Climbing with a HRP-2 Humanoid | J. Vaillant, A. Kheddar, H. Audren, F. Keith, S. Brossette, A. Escande, K. Bouyarmane, K. Kaneko, M. Morisawa, P. Gergondet, E. Yoshida, S. Kajita, F. Kanehiro | Autonomous Robots | 2016 | ||
| Identification of Fully Physical Consistent Inertial Parameters using Optimization on Manifolds (Submitted) | S. Traversaro, S. Brossette, A. Escande, F. Nori | IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) | 2016 | ||
| Parametrization of Catmull-Clark subdivision surfaces for posture generation | A. Escande, S. Brossette, A. Kheddar | IEEE International Conference on Robotics and Automation | 2016 | ||
| Humanoid posture generation on non-Euclidian manifolds | S. Brossette, A. Escande, G. Duchemin, B. Chrétien, A. Kheddar | IEEE-RAS International Conference on Humanoid Robots | 2015 | ||
| Vertical ladder climbing by the HRP-2 humanoid robot | J. Vaillant, A. Kheddar, H. Audren, F. Keith, S. Brossette, K. Kaneko, M. Morisawa, E. Yoshida, F. Kanehiro | IEEE-RAS International Conference on Humanoid Robots | 2014 | ||
| Integration of non-inclusive contacts in posture generation | S. Brossette, A. Escande, J. Vaillant, F. Keith, T. Moulard, A. Kheddar | IEEE/RSJ International Conference on Intelligent Robots and Systems | 2014 | ||
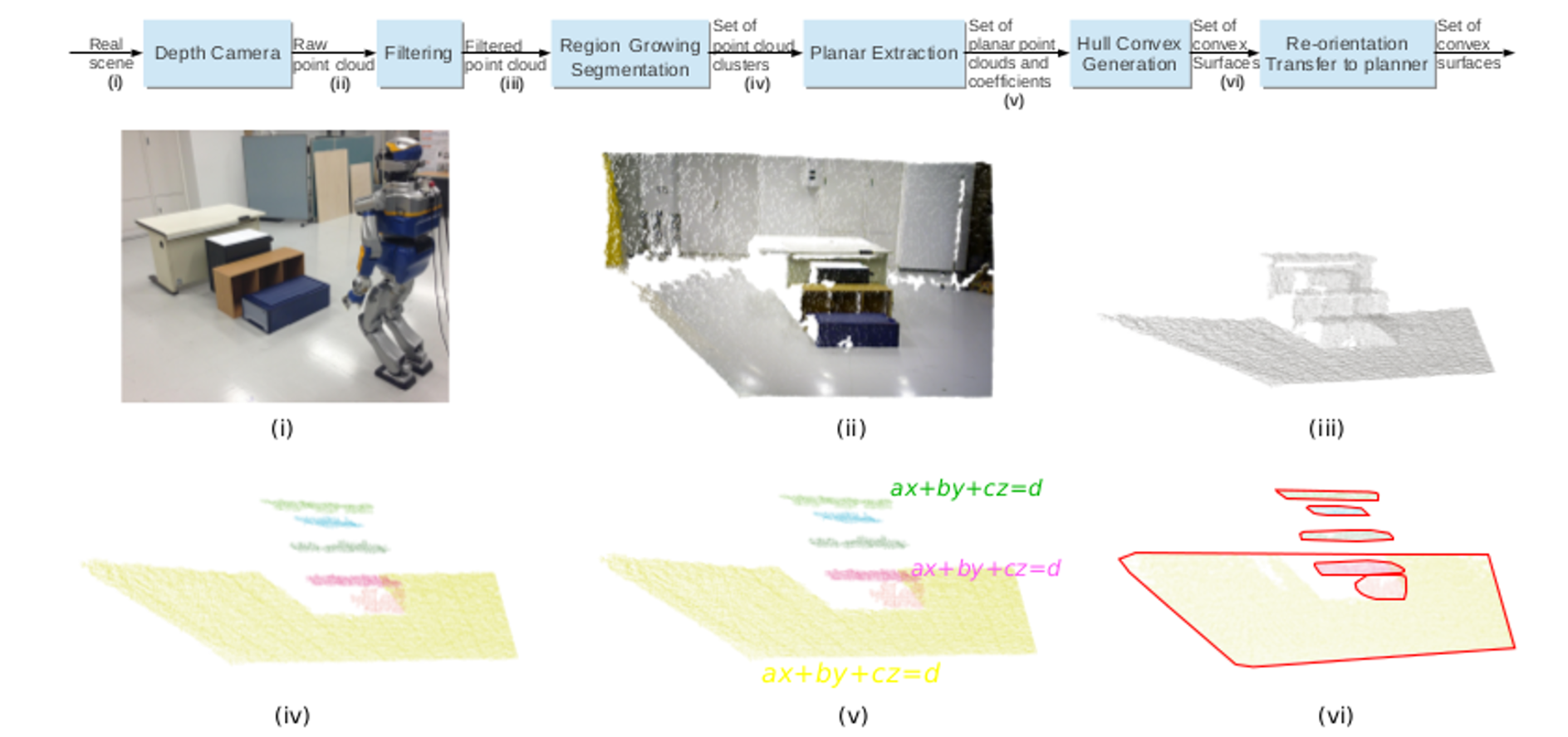
| Point-Cloud Multi-Contact Planning for Humanoids: Preliminary Results | S. Brossette, J. Vaillant, F. Keith, A. Escande, A. Kheddar | IEEE International Conference on Robotics, Automation and Mechatronics | 2013 |