
















概要
In Roman mythology, Janus represents the transition from the past to the future, like the one we are seeing today with new technologies. It also represents bridges and connections, like the ones we are building between humans and robots: two entities into the same body.
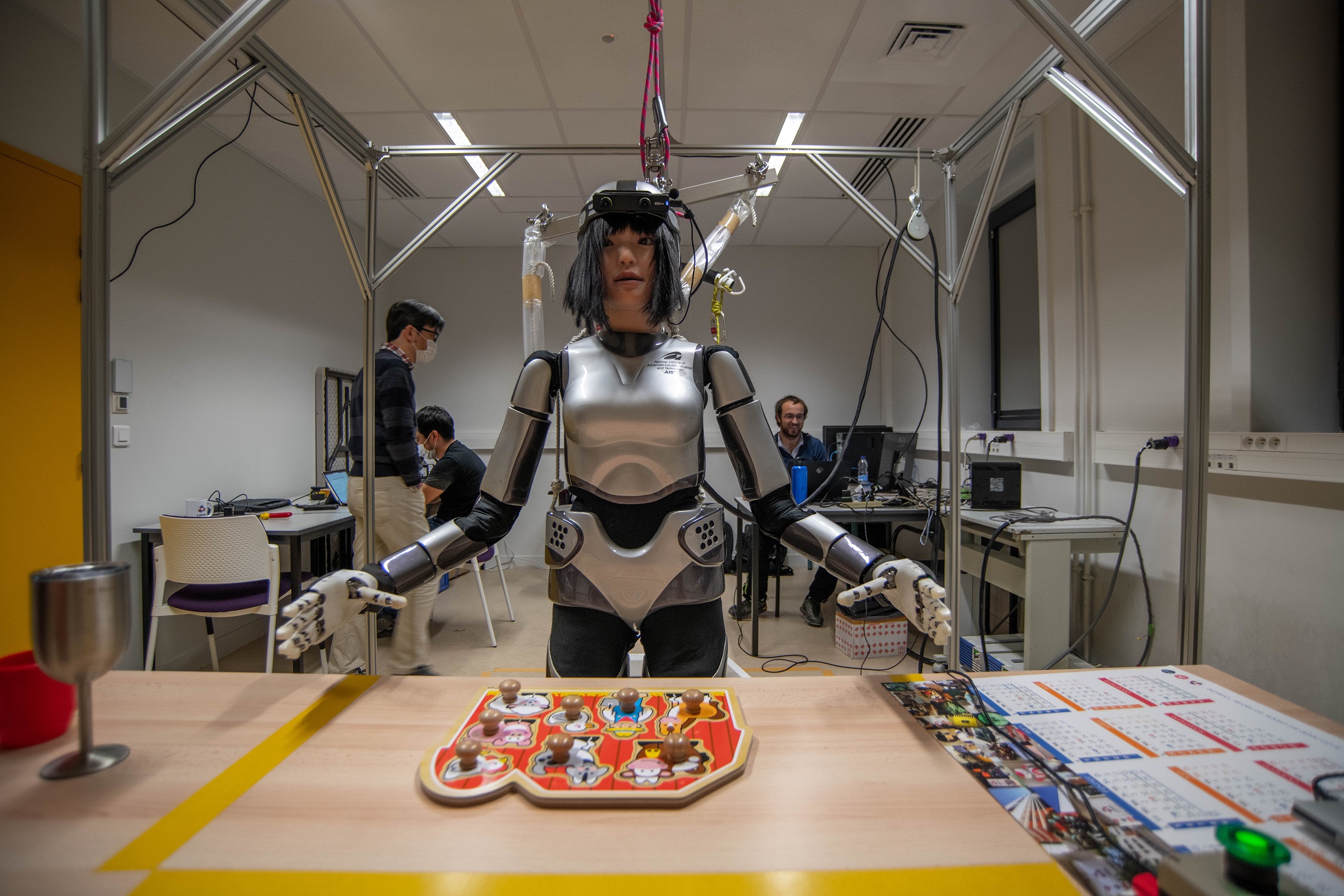
JANUS is a bi-located team that gathers expertise from the Japanese National Institute of Advanced Industrial Science and Technology (AIST) and the French National Centre for Scientific Research CNRS (CNRS), namely CNRS-AIST Joint Robotics Laboratory (JRL) and LIRMM, Interactive Digital Human laboratory in Montpellier. These teams have extensive experience in humanoid robotics, haptics, brain computer interfaces, control, telerobotics and telepresence, embodiment and physical avatars. AIST is the co-developer with Kawada industries of the world renown HRP humanoid families and the main developer of the HRP Miim, the first effectively walking geminoid called cybernetic human and has extensive expertise in humanoid robotics. CNRS posses the only HRP-4 humanoid present in Europe. CNRS and AIST to some extent, were also partners of the EU Virtual Embodiment and Robotic Re-Embodiment (VERE) project where a telepresence embodiment station featuring advanced multi-modal feedback decodes the participant’s motor intentions at the EEG brain level to control humanoid robots even over large distances. CNRS with AIST joint efforts in the last EU Comanoid project where humanoid robots are envisioned to work in large-scale aeronautics manufacturing.
Why are we competing in ANA Avatar XPRIZE?Our main mission is to create and advance knowledge for the well-being of humanity and society. Challenging competitions like ANA Avatar XPRIZE are the technological catalyzers for new ideas and technologies. Furthermore, the Covid19 outbreak highlighted the need for such an avatar technology in healthcare services, frail persons homes, as well as many other economical and societal sectors.
Which have been the biggest challenges?The biggest challenge is the seamless integration of existing and new technologies into a reliable architecture. Particularly, the transparency of the teleoperation is extremely challenging in anthropomorphic robotic systems. When using a humanoid robot as an avatar, the sensory feedback scales in complexity. For example, how do you provide the dynanmic balance awareness to the human operator? How do you alleviate the lack of degrees of freedom? How do you conceive a reliable loco-manipulation shared control?
実施期間
2018-2022発表論文
| タイトル | 著者 | 学会/論文誌 | 年 | bib | |
| Analysis and Perspectives on the ANA Avatar XPRIZE Competition | K. Hauser, E. Watson, J. Bae, J. Bankston, S. Behnke, B. Borgia, M. G. Catalano, S. Dafarra, J. B.f. Van Erp, T. Ferris, J. Fishel, G. Hoffman, S. Ivaldi, F. Kanehiro, A. Kheddar, G. Lannuzel, J. Ford Morie, P. Naughton, S. Nguyen, P. Oh, T. Padir, J. Pippine, J. Park, D. Pucci, J. Vaz, P. Whitney, P. Wu, D. Locke | International Journal of Social Robotics | 2024 | ||
| A cybernetic avatar system to embody human telepresence for connectivity, exploration, and skill transfer | R. Cisneros-Limón, A. Dallard, M. Benallegue, K. Kaneko, H. Kaminaga, P. Gergondet, A. Tanguy, R. Singh, L. Sun, Y. Chen, C. Fournier, G. Lorthioir, M. Tsuru, Ś. Chefchaouni-Moussaoui, Y. Osawa, G. Caron, K. Chappellet, M. Morisawa, A. Escande, Ko Ayusawa, Y. Houhou, I. Kumagai, M. Ono, K. Shirasaka, S. Wada, H. Wada, F. Kanehiro, A. Kheddar | International Journal of Social Robotics | 2024 | ||
| Learning to Classify Surface Roughness Using Tactile Force Sensors | Y. Houhou, R. Cisneros-Limón, R. Singh | IEEE/SICE International Symposium on System Integration | 2024 | ||
| Enhanced Visual Feedback with Decoupled Viewpoint Control in Immersive Humanoid Robot Teleoperation using SLAM | Y. Chen, L. Sun, M. Benallegue, R. Cisneros-Limón, R. Singh, K. Kaneko, A. Tanguy, G. Caron, K. Suzuki, A. Kheddar, F. Kanehiro | IEEE-RAS International Conference on Humanoid Robots | 2022 |


