
Bio
- M.Sc. Aerospace Engineering, SUPAERO, 2013
- M.Sc. Applied Mathematics, University of Toulouse, 2013
- Ph.D. Robotics, University of Montpellier, 2016
Research interests
- Unobtrusive monitoring of human interactions with the environment
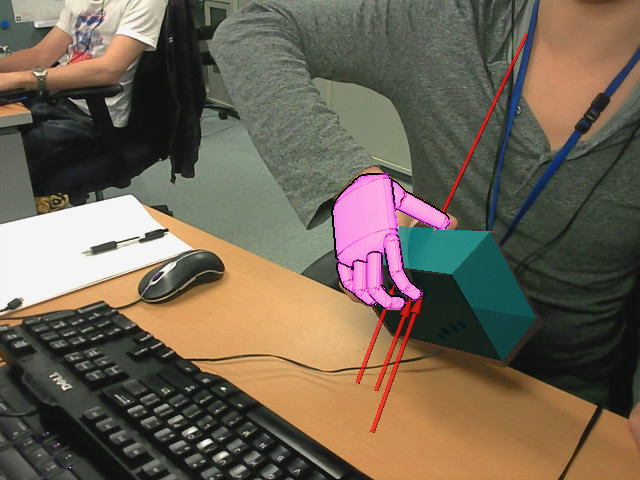
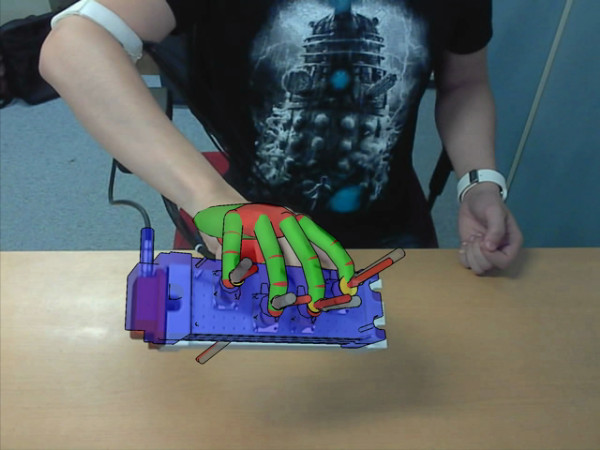
- Physics-based optimization and learning for contact force sensing from vision
Videos
Publications
The publication list may not be complete, especially for publications prior to 2017. We are working on updating it.
| Title | Authors | Conference/Book | Year | bib | |
| Hand-object contact force estimation from markerless visual tracking | Tu-H. Pham, N. Kyriazis, A. Argyros, A. Kheddar | IEEE Transactions on Pattern Analysis and Machine Intelligence | 2017 | ||
| Multi-Contact Interaction Force Sensing from Whole-Body Motion Capture | Tu-H. Pham, S. Caron, A. Kheddar | IEEE Transactions on Industrial Informatics | 2017 | ||
| Whole-Body Contact Force Sensing From Motion Capture | Tu-H. Pham, A. Bufort, S. Caron, A. Kheddar | IEEE/SICE International Symposium on System Integration (SII) | 2016 | ||
| Towards force sensing from vision: Observing hand-object interactions to infer manipulation forces | Tu-H. Pham, A. Kheddar, A. Qammaz, A. Argyros | IEEE/CVF Conference on Computer Vision and Pattern Recognition | 2015 |