
Bio
- M.Sc. Aerospace Engineering, SUPAERO, 2013
- M.Sc. Applied Mathematics, University of Toulouse, 2013
- Ph.D. Robotics, University of Montpellier, 2016
研究テーマ
- Unobtrusive monitoring of human interactions with the environment
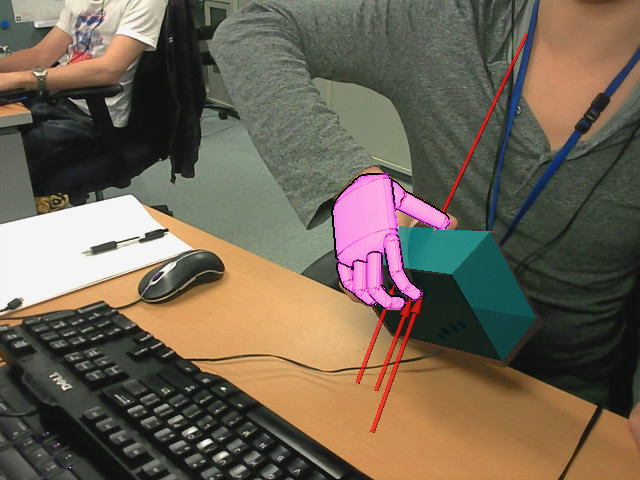
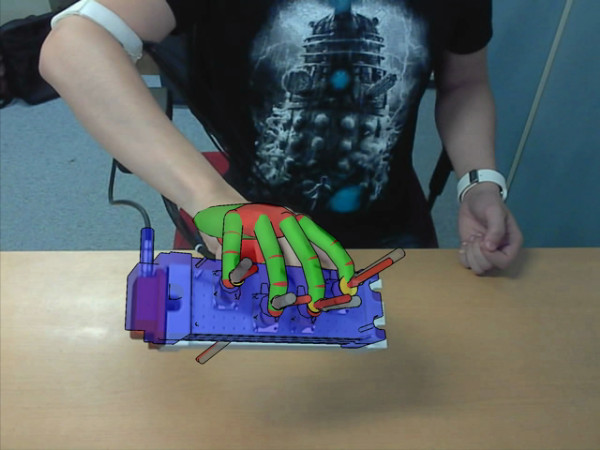
- Physics-based optimization and learning for contact force sensing from vision
ビデオ
論文
論文リストは完全ではない場合があります。特に2017年以前の論文については、更新作業を進めています。
| タイトル | 著者 | 学会/論文誌 | 年 | bib | |
| Hand-object contact force estimation from markerless visual tracking | Tu-H. Pham, N. Kyriazis, A. Argyros, A. Kheddar | IEEE Transactions on Pattern Analysis and Machine Intelligence | 2017 | ||
| Multi-Contact Interaction Force Sensing from Whole-Body Motion Capture | Tu-H. Pham, S. Caron, A. Kheddar | IEEE Transactions on Industrial Informatics | 2017 | ||
| Whole-Body Contact Force Sensing From Motion Capture | Tu-H. Pham, A. Bufort, S. Caron, A. Kheddar | IEEE/SICE International Symposium on System Integration (SII) | 2016 | ||
| Towards force sensing from vision: Observing hand-object interactions to infer manipulation forces | Tu-H. Pham, A. Kheddar, A. Qammaz, A. Argyros | IEEE/CVF Conference on Computer Vision and Pattern Recognition | 2015 |