Project Description
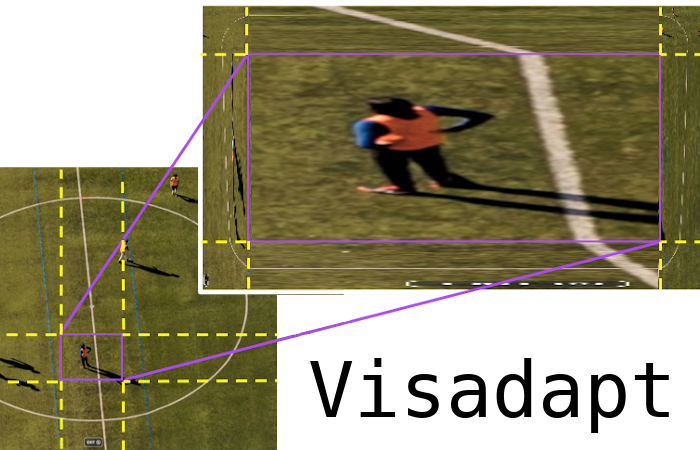
Visadapt is an exploratory project funded by the PEPS “Mechanics of the future” program of CNRS’ Institute of Engineering and Systems Sciences (INSIS). In this project, CNRS-AIST JRL is partnering with Inria and Polytech Lille members of CRIStAL (France) and UPJV, MIS lab (France) with the aim of creating a new camera of highly non-linear field-of-view, enabled by soft robot mirror. The interest is to automatically adapt the resolution of the camera to the scene content, i.e. low in uniform or not interesting areas but high in informative areas or interesting regarding the application (e.g. body, face, geometric features, etc).
The goals are:
- To design a new mirror material capable of deformations while keeping high quality reflection
- To model and compute efficiently the desired shape of the mirror soft robot as function of a field-of-view distribution
- To control the deformation from visual input
A realistic simulator and a first prototype are the expected results.
Period
2021-2022Related Publications (including JRL contributions)
| Title | Authors | Conference/Book | Year | bib | |
| Visadapt: Catadioptric adaptive camera for scenes of variable density of visual information | J. Ducrocq, G. Caron, H. Midavaine, C. Duriez, J. Dequidt, E. Mouaddib | Applied Optics | 2023 |