Project Description
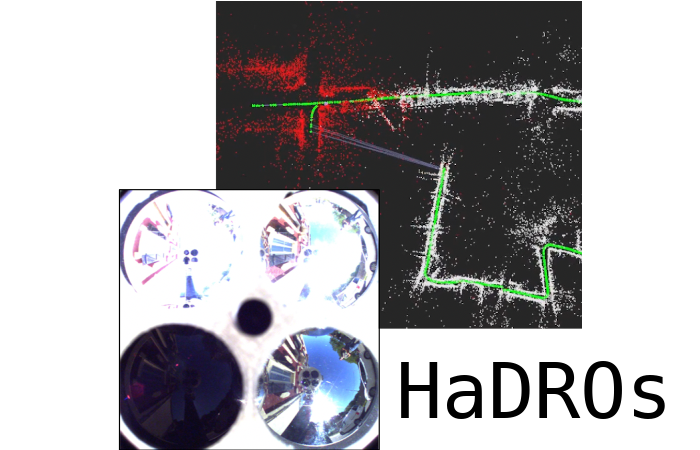
HaDROs is an exploratory project funded by CNRS’ Special Interest Group on Information, Signal, Image and Vision (GDR ISIS). In this project, CNRS-AIST JRL is partnering with INSA members of IRISA (France) and UPJV, MIS lab (France) with the aim of enabling visual Simultaneous Localization And Mapping (SLAM) in environments of challenging lighting, i.e. where we can find both dark shadowed and very bright areas at once. HaDROs leverages the recently introduced panoramic High Dynamic Range (HDR) real-time camera HDROmni and works on multi-exposure / multi-map SLAM.
The goals are:
- To accurately calibrate the HDROmni camera despite the various exposures acuired at once
- To generalize the multi-map SLAM to multi-exposure
- To enable assistive visual feedback for electric powered wheelchair users even when the surrounding illumination is challenging
The HaDROs system will be integrated on an assistive wheelchair of INSA Rennes (France) and assessed with real users.
Period
2021-2023Funded by
CNRS GDR ISISRelated Publications (including JRL contributions)
| Title | Authors | Conference/Book | Year | bib |

