概要
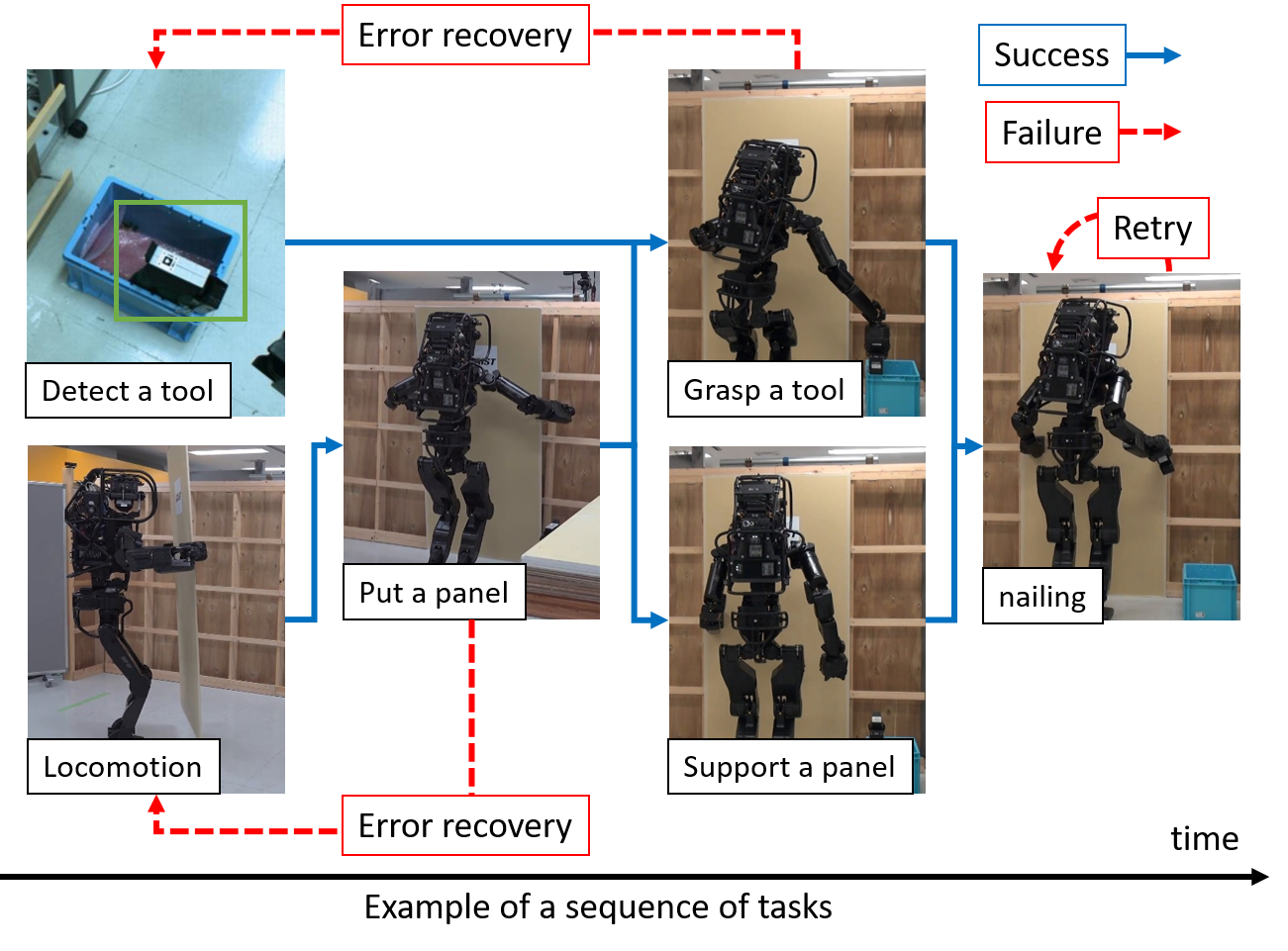
This project is a four-year research project funded by JSPS Kakenhi Grant-in-Aid for Early-Career Scientists (19K20380). Our ultimate goal is enabling a robot to autonomously generate and perform a sequence of target tasks considering task dependencies, constraints of a robot and the surrounding environment. To achieve this goal, we will conduct research and development on the following three topics.
- Task management system which can perform error recovery and parallel processing of a task sequence based on the dependency of tasks.
- Motion planning technology which can generate feasible whole-body motion for a robot to reach the destination and perform required tasks considering kinematics and dynamics constraints.
- Semantic environmental memorization to find objects which are neccesary for task execution.
実施期間
2019.4-2023.3資金提供
日本学術振興会 科学研究費助成事業(科研費) 若手研究発表論文
| タイトル | 著者 | 学会/論文誌 | 年 | bib |