
小関 義彦/KOSEKI Yoshihiko
健康医工学研究部門
Health and Medical Research Institute
治療診断技術研究グループ 研究グループ長
研究テーマ
- 手術中計測と低侵襲治療
- 針穿刺の計測と制御、評価
- 手術ロボットの安全性評価
研究内容
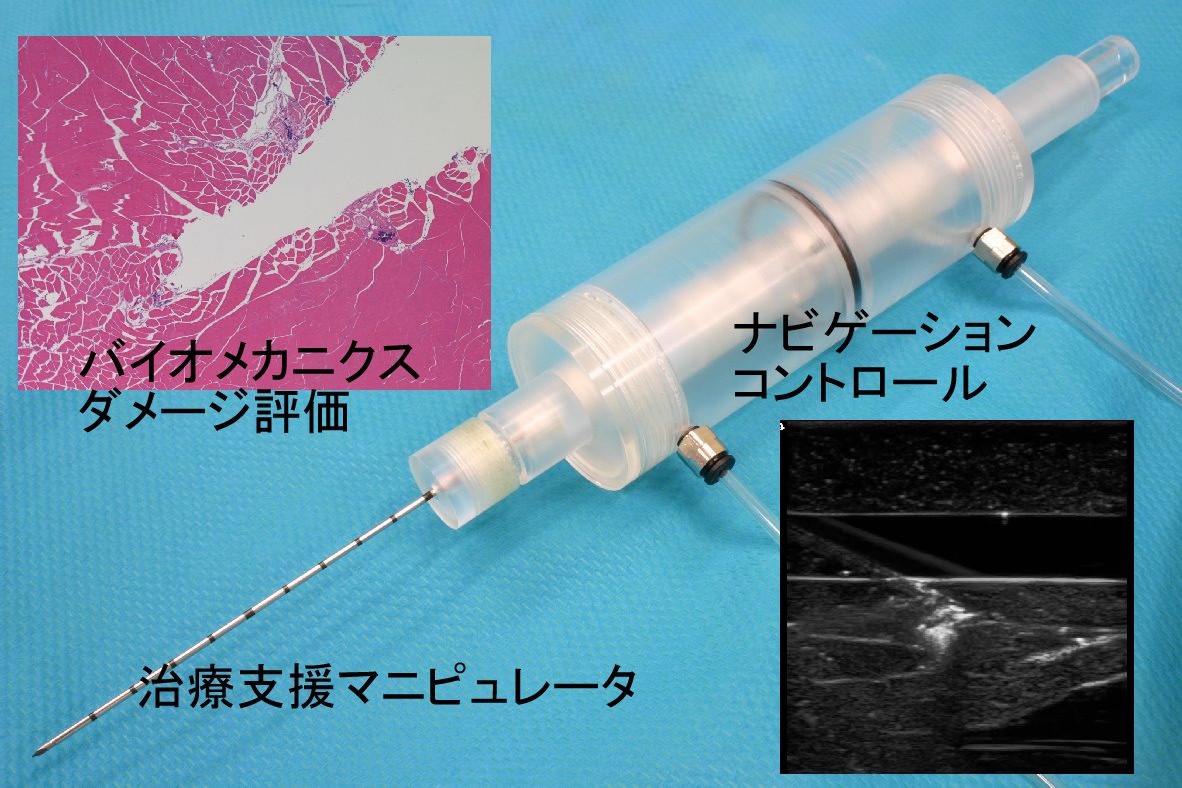
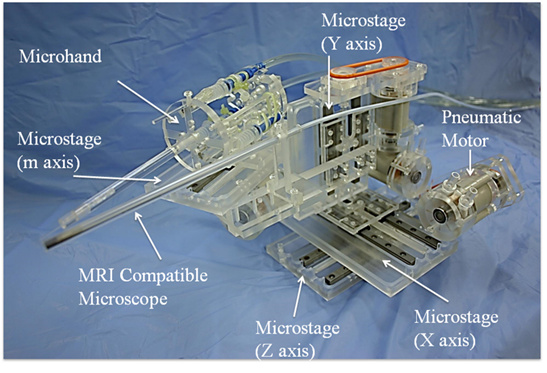
MRIの磁場内で動く手術ロボットにより、MRIから得られる生理情報をリアルタイムに手術反映できるシステムを構築する。安全で確実に針を穿刺するための穿刺の手応えを分かり易く提示するロボットを構築する。手術ロボットをはじめとした革新的医療機器の安全性を評価する手法を確立する。
キーワード
針穿刺補助装置
技術内容

硬膜外穿刺において黄色靭帯の貫通の手ごたえを正確に感知することは安全な穿刺を行う上で重要である。そこで針先端の切開力を針側面の摩擦力と分離する穿刺補助装置を考案した。二重針の先端を為す内針を術者が挿入し、側面を為す外針を装置が挿入することで先端切開力と側面摩擦力を分離した。人間工学実験の結果、貫通の感知が容易になることが示された。また、本穿刺補助装置の低価格化とディスポーザブル化のために電気部品を使わない空気圧駆動版を考案した。
関連知財
- 特許第5464426号(2010/01/19):穿刺針刺入装置
- 特許第5751588号(2011/07/04):穿刺針刺入装置
- 特許第5780517号(2011/07/04):穿刺針刺入装置
応用可能な産業分野キーワード
針穿刺バイオメカニクス
技術内容
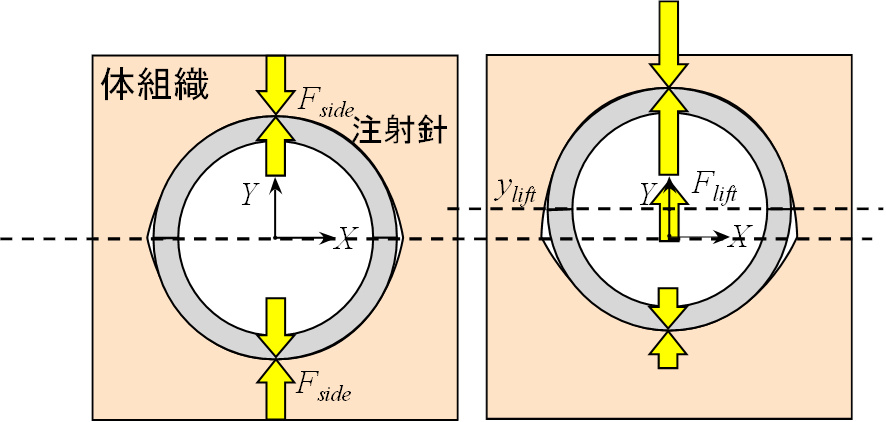
針穿刺時の変形や破壊のモデルを構築することは、針の曲がりの予測や穿刺や痛みの少ない針の設計に有用である。針を穿刺された筋組織を組織学的に観察することで、組織の変形や破壊を実験的に観察した。その結果、筋繊維の方向に対する刃面の向きによって穿刺機序に違いがあることが示された。 針側面に垂直にかかる力を知ることは針側面摩擦を評価する上で不可欠であるが、これまで妥当な値が示されてこなかった。針側面垂直力を数値解析により推定する際に、材料定数ではなく類似したモデルの実験値を用いる手法を考案した。これを分割針にかかる針側面垂直力と比較したところ高い一致が見られた。
応用可能な産業分野キーワード