スマート監視技術研究チーム
研究の背景と目的
スマート監視技術研究チームは、インフラの点検やモニタリングのための革新的技術を開発する研究を行っています。 現在の主な研究テーマは、道路下の水道管の腐食に影響を与える腐食性土壌を特定するUGV非破壊電気探査法の開発、 分布型音響センシング(DAS)を用いた地下鉄や高速道路のトンネル掘削工事のモニタリング、トンネル・盛土構造物などの 健全性を評価するロボット探査技術やマーカー・ミュオンを用いたモニタリング技術の開発です。
研究チームの研究課題または研究成果など
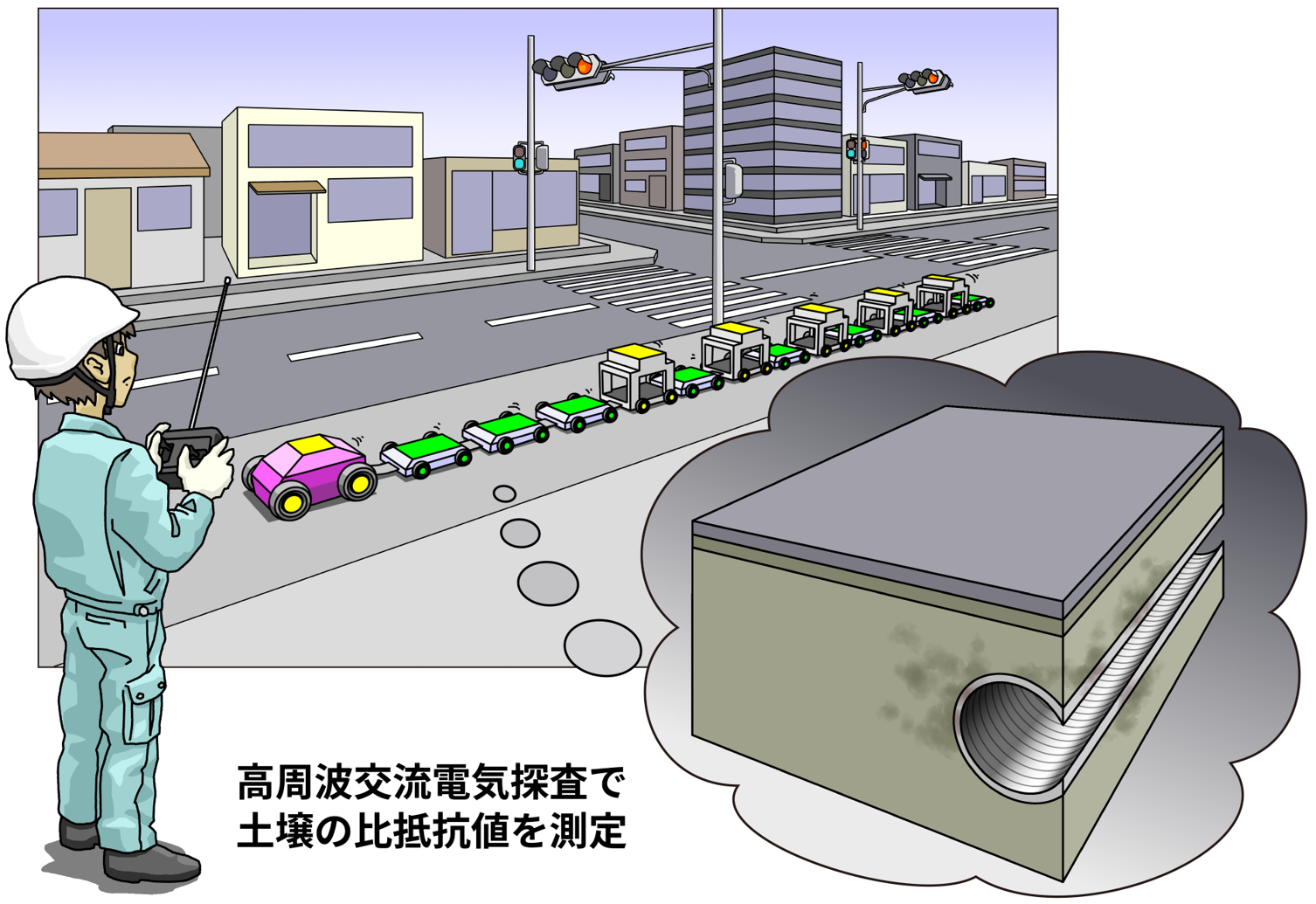
1.水道管路の腐食リスク評価のためのUGV非破壊電気探査
全国で整備されている水道管のうち2割以上が耐用年数を超過しているとされており、その更新や修理は喫緊の課題です。 水道管の腐食は水道管周辺の土壌の腐食性に強く異存します。 高周波交流電流を利用して、アスファルトやコンクリート路面を傷つけることなく、土壌の比抵抗を測定し、水道管の腐食リスクを評価する技術を開発しています。
2.分布型音響センシング(DAS)を用いた都市域トンネル掘削工事のモニタリング技術
近年、既設の光ファイバ回線をセンサとして活用し、都市部などで効率的に弾性波探査を実施する技術が注目されています。 分布型音響センシング(DAS)技術を用いることで、既存の埋設光ファイバケーブルの広範かつ連続的な区間をセンサ化し、 トンネルなどの建設前の地盤調査やトンネル掘削時の安全性評価を効率的に実施する技術を開発しています。
3.土木構造物の健全性を評価するロボット探査技術やマーカー・ミュオン探査技術
土木構造物の健全性や安全性を評価する上で、省力化によって広域をカバーし、人が近づけない場所でも調査可能な技術が求められています。 これらを可能とするロボット探査技術やマーカー・ミュオン探査技術を開発しています。

構成メンバー
| 研究チーム長 | 神宮司 元治 |
|---|---|
| 梅澤 良介 | |
| 児玉 匡史 | |
| 湊 翔平 | |
| 田中 秀幸(兼務) | |
| 神村 明哉(兼務) | |
| 有隅 仁(兼務) | |
| 宮腰 清一(兼務) | |
| 山本 知生(兼務) |