研究チーム
オートメーション | つながる工場 | ミニマル試作 | フィールドロボティクス
ディペンダブルシステム | スマートテキスタイル研究チーム | 3D造形評価研究チーム
三菱電機-産総研 Human-Centric システムデザイン連携研究室
オートメーション研究チーム
| 臨海副都心センター | メンバー | ||
| HP: | https://unit.aist.go.jp/icps/icps-am/ | |
目標
機械(ロボット)によるオートメーションの効率性と、機械と人との親和性を高めるため、機械が器用に作業をするための基盤技術と、機械が人と環境を共有するための基盤技術を研究開発し、工場や店舗の模擬環境での実証を行います。
ロボットによる物品操作技術
- 教示なしで、ロボットが未知の部品をピッキング(取り出し)
- 絡み合うような複雑な部品を、AI・シミュレータでピッキング可能に
- 工場での部品供給や店舗の陳列作業の自動化に応用可能
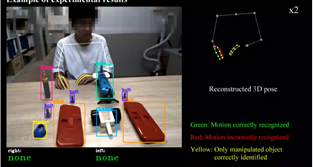
- 人がどんな物体を持ち、どう操作しているかを、画像やセンサグローブから判定
- 熟練者の作業分析や、ロボットの行動計画に応用可能
 |
 |
|||
| 工場部品供給を想定した未知部品のピッキング | 人の作業認識・ロボットへの転写 |
つながる工場研究チーム
| 臨海副都心センター | メンバー | ||
| HP: | - | |
目標
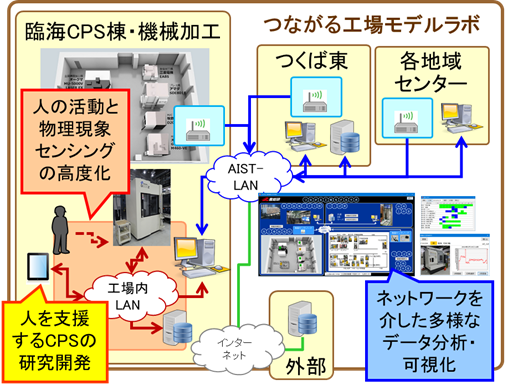
製造業の現場を中心とする設計・生産システムを対象に、人の作業と知的活動および加工等物理現象のセンシング技術を高度化し、ネットワークを介した多様なデータ分析・可視化技術を開発することで、人を支援するCPSの実現を目指します。
「つながる工場」の研究開発
- 製造業の現場を中心とする設計・生産システムを対象に、ネットワークを介した多様なデータ分析・可視化技術の研究開発を実施
- 人の活動と加工等物理現象のセンシング技術を高度化する研究開発を実施し、設計・生産に関する情報(サイバー)と物理(フィジカル)を統合して産業応用につなげる成果を創出
- 産総研と公設試等との間で「つながる工場」の実証環境を構築し、地域公設試におけるIoT活用人材育成と地域中小企業でのIoT活用促進を図ります。
 |
||
| つながる工場の研究開発 |
ミニマル試作研究チーム
| 臨海副都心センター | メンバー | ||
| HP: | - | |
目標
ミニマルファブを対象に、安全性と柔軟性を担保しつつ多品種少量生産システムとしての生産性向上技術を開発し実証します。
ミニマルファブの試作実証
- ミニマル共通基盤プロセス技術を利用したデバイス試作
- 安定性、品質を意識したファクトリー開発
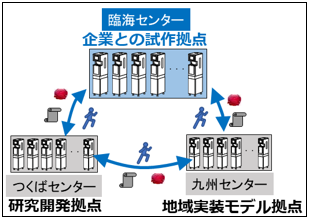
- 研究開発拠点(つくばセンター)との協力によるデバイスプロセス技術開発、及びミニマル制御・モニタリング技術開発
- 地域実装モデル拠点(九州センター)との協力によるミニマルパッケージング装置の実稼働とIoTセンサプロセス技術開発、及びミニマル遠隔制御を軸にした、「つながる工場」化
 |
 |
|||
| 人・モノ・情報の移動による 各ミニマルファブ拠点の一体的な開発体制 |
臨海センターCPS棟のミニマルファブ |
フィールドロボティクス研究チーム
| つくばセンター 第2事業所 | メンバー | ||
| HP: | https://unit.aist.go.jp/icps/icps-fr/ | |
目標
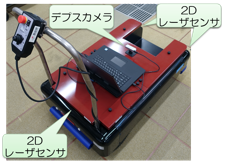
老朽化・人手不足が深刻な社会インフラ、産業インフラ等大型施設における作業、センシング、計画・制御などロボットシステムに関する技術開発及び高度化を行います。
社会/産業インフラの維持・管理、災害対応などに向けたフィールドロボティクスに関する研究開発
- コア技術である陸海空フィールドロボットによるアクセス技術を現場に適合する形で高度化します。
- 作業性・運動性能向上のため、超小型油圧アクチュエータの開発・検証を行います(コア技術の創生)
- さらに、エッジAI、クラウド・AIの活用によりロボットアプリケーション、サービスの拡大を図ります。
- 機体技術基準(信頼性・安全性、危害抑制、騒音対策等)、制御技術基準(危害抑制機能の自動作動等)を開発
 |
ディペンダブルシステム研究チーム
| つくばセンター 第2事業所 | メンバー | ||
| HP: | - | |
目標
製造業および介護サービスの現場における人とロボットの協調システムに関する、モデリングやセンシング、リスクアセスメント、システム設計等の技術の高度化、およびAIの活用による、安全性と柔軟性、作業性や生産性を確保する技術を開発し実証します。
サービスロボット、産業用ロボットの安全に関する研究開発、試験法開発、標準化
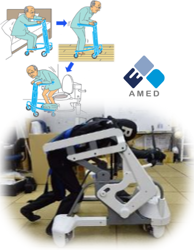
- 介護ロボットの安全・効果基準、試験法開発と標準化(AMEDロボット介護機器開発・標準化事業)
- 農業用ロボット、物流ロボット、駅サービスロボットのリスクアセスメント、安全基準、認証スキームの開発、標準化
- 光学式安全センサ、柔軟外装、人検知センサの評価技術、試験技術の開発、標準化
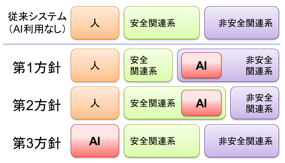
- ロボットの安全確保のためのAI品質、信頼性基準の開発、標準化
- AI搭載ロボットの安全性評価プラットフォームの開発、評価技術の研究開発
 |
 |
||
| 排泄動作支援ロボット | ロボット安全基準・試験法開発 | ||
 |
 |
||
| AI安全評価用ロボットDRC-3 | AI安全3方針 |
スマートテキスタイル研究チーム
| 北陸デジタルものづくりセンター | メンバー | ||
| HP: | - | |
目標
誰もが安全で安心な社会を目指し、人に寄り添い、人を高める技術としてセンシングから介入までを気付かれずに行うことのできるウェアデバイスを開発し、ものづくりのサービス化を加速と新産業創出を図ります。
ウェアラブルデバイスからウェアデバイスへ
着用することに違和感のない、着心地や意匠性と機能を両立させたデバイス とその作製技術の開発を行い、バイタルシグナルだけでなく行動や動作のデー タ化を図り、就労現場での作業効率化と同時に熟練者の技術伝承や作業の安全性向上、スポーツの競技力向上とスポーツ障害の予防、介護・看護支援などを実現します。
人間の身体能力とコミュニケーション能力を拡張ヒトのデジタルツインであるデジタルヒューマンにもとづく運動解析技術や感情の可視化技術、高臨場感を実現するxR技術などにより、センシングか らサービスデザインまでを統合した開発環境を構築します。
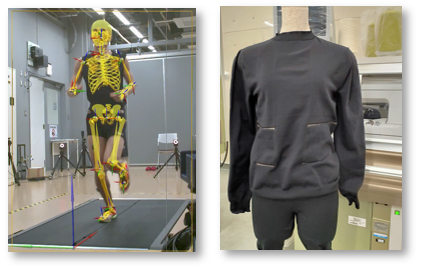 |
| デジタルヒューマンにもとづく運動解析システムと呼吸やバイタルをセンシング可能なニットデバイス |
3D造形評価研究チーム
| 北陸デジタルものづくりセンター | メンバー | ||
| HP: | - | |
目標
オンデマンドなものづくりに優れた3D造形技術と、高精度な計測技術を活用したデジタルものづくりの研究開発を推進し、産業界への普及と活用に貢献します。
3D造形によるデジタルものづくりの研究開発
- CAD、CAM、計測のループで構成される3D造形情報処理システムの構築
- 積層造形に適した設計手法(DfAM)、また、トポロジー最適化や焼結等の数値シミュレーション技術の開発
- バインダージェット方式の金属3Dプリンタを用いた造形工程の高度化
- 疲労試験による疲労強度評価、3次元形状測定による外形状誤差評価
- 電子顕微鏡による結晶方位解析
- 北陸とつくばの2拠点をつなぐ遠隔計測システムの実現
 |
 |
|||
| バインダージェット方式の金属3Dプリンタ | 電界放出形走る査電子顕微鏡(FE-SEM) |
三菱電機-産総研Human-Centricシステムデザイン連携研究室
| 臨海副都心センター | メンバー | ||
| HP: | - | |
目標
「イノベーションの先に目指すべき『豊かな未来』」を⽬指し、一人ひとりが快適で健康的な「パーソナルwell-being(ウェルビーイング)社会」に向けた革新技術の開発と、「産業を繋ぐCPS」を融合したシステムデザインの実現に取り組みます。
パーソナルwell-being社会に向けた⾰新技術と産業を繋ぐCPSを融合したシステムデザインへ
少子高齢化による生産年齢人口の減少の対策として、製造業を含む全ての産業分野では、従業員の仕事の質(QoW: Quality of Working)と労働生産性の向上が求められている。また、リモートワークの普及が進み、自宅やサテライトオフィスなど働く空間の快適性も注目されています。
ここで、個人のQoWに着目し、その働き方や体調に応じて実力を最大限に発揮できる環境の構築が必要であり、そのためには、物理的・地理的空間の制約を受けない就労環境制御や、個人の能力に応じた複数の業務を可能とする仕組みの構築が重要です。
本連携研究室は、三菱電機が保有するQoWを高めるための機器・制御技術や効果検証技術、産総研が保有する人間計測・評価技術や生産性向上に向けたCPS構築技術の融合により、QoWの高い快適な労働環境による生産性向上や高度な快適性を届ける統合ソリューションの実現を目指します。
 |
※関連ニュース 「三菱電機-産総研 Human-Centricシステムデザイン連携研究室」を設立