生活機能ロボティクス研究チーム
Assistive Robotics Research Team
(日本語/English)
●ICAT-EGVE2024 にて Best Poster Award を を受賞しました。
"Evaluation of a Concept of Developing Daily Experience Database Using Virtual Proof-of-Concept Experiment in Shopping Use Case",
- 顔写真
-
役職・名前
 (+@aist.go.jp) 専門・担当分野
(+@aist.go.jp) 専門・担当分野 
-
hideyuki-tanaka高精度マーカ、環境構造化、ロボットビジョン、測位
(研究紹介 4) 
-
isamu.kajitani

-
主任研究員
関山 守m.sekiyamaIoT、AAL、機能安全、標準化 
-
ogata.kunihiro人の身体や運動のモデル化とそれに基づく支援技術▲Top
(研究紹介 2, 5) izumi-k横編み機を用いた「ウェアデバイス」作製技術に関する研究、印刷技術を用いた回路作製・核磁気共鳴装置開発
izumi-k横編み機を用いた「ウェアデバイス」作製技術に関する研究、印刷技術を用いた回路作製・核磁気共鳴装置開発
(研究紹介 8, 9) yumeko.imamura動作支援技術とそのバイオメカニクス的解析
yumeko.imamura動作支援技術とそのバイオメカニクス的解析 shinozaki.masayoshi生体計測、生体計測用電子回路の設計・制御
shinozaki.masayoshi生体計測、生体計測用電子回路の設計・制御 招聘研究員
招聘研究員
岡本 茂雄shigeo.okamoto医療・介護・健康データの活用
(研究紹介 3) テクニカルスタッフ
テクニカルスタッフ
後藤 大輔gotou.daisukeウェアラブルセンサを用いた無拘束計測 テクニカルスタッフ
テクニカルスタッフ
鶴岡 利至tsuruoka-t横編機、無縫製横編み機のためのニットデザイン、および各種機能性ニット地の編成テクニカルスタッフ
戸塚 健一ken.totsuka福祉用具・介護ロボットの研究開発テクニカルスタッフ
井原 昭典a.iharaテクニカルスタッフ
大里 美佳mika.oosato テクニカルスタッフ
テクニカルスタッフ
都邉 祥子tobe.sachikoテクニカルスタッフ
髙橋 尚美takahashi.naomiクレリカルスタッフ
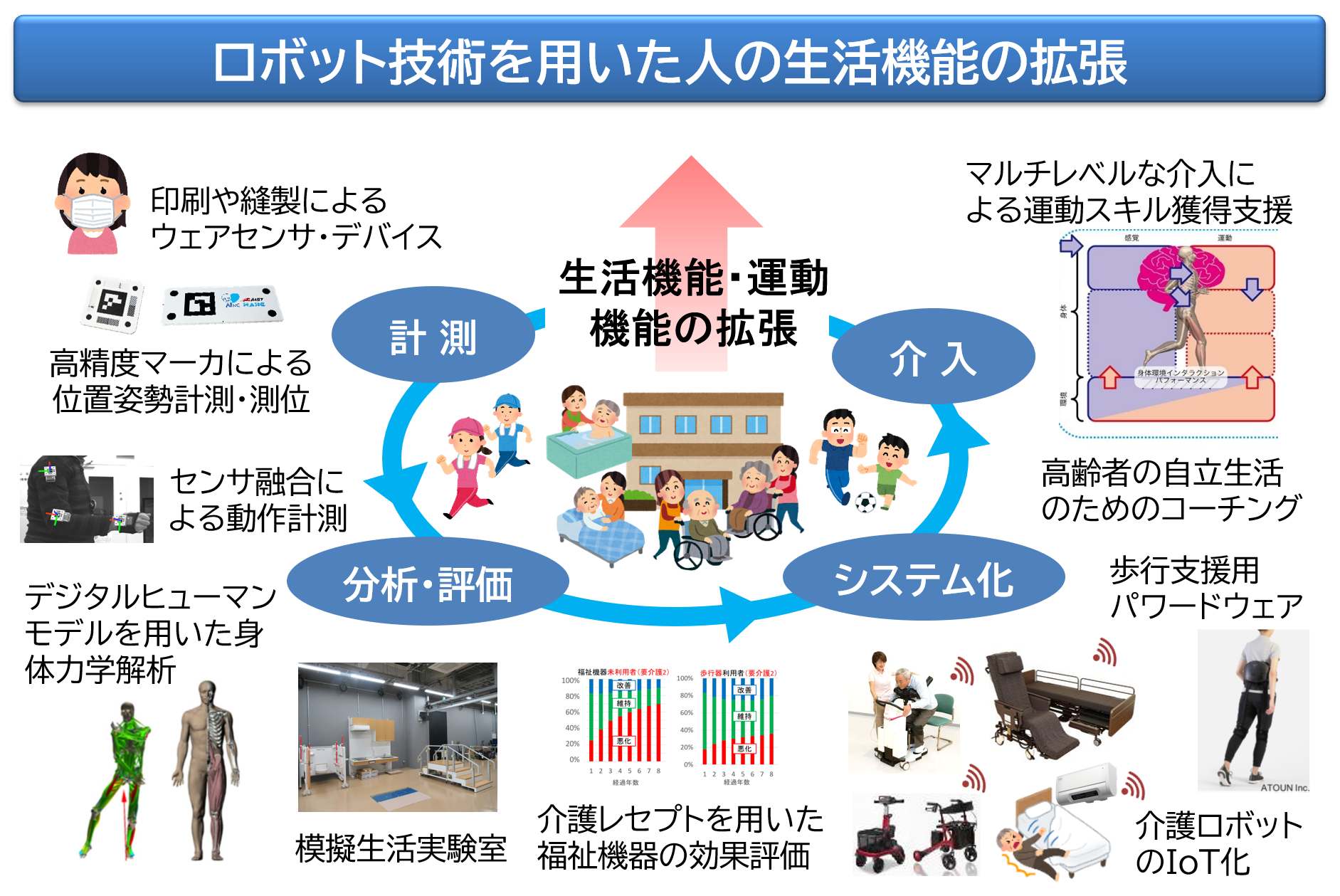
木村 靜江kimura-sz人々の生活機能の拡張、および高齢化社会におけるQOL向上やサービスの効率化を目指して、日常生活において人の支援を行うロボット技術(Assistive Robot, Assistive Technology)の研究開発を行い、社会に資する次世代ロボット機器の実用化を目指します。センサ技術や計測技術、運動機能への介入技術の開発に加え、ユーザの生活を分析し機器の設計につなげる設計支援や、安全性および効果の評価技術の開発を行い、実証実験や企業との連携を通じて、実用化による社会への成果還元を目指します。
生活機能ロボティクス研究チームの紹介動画(約3分30秒)ショート版(約45秒)はこちら(新しいタブで開きます)
 介護ロボットの評価・検証
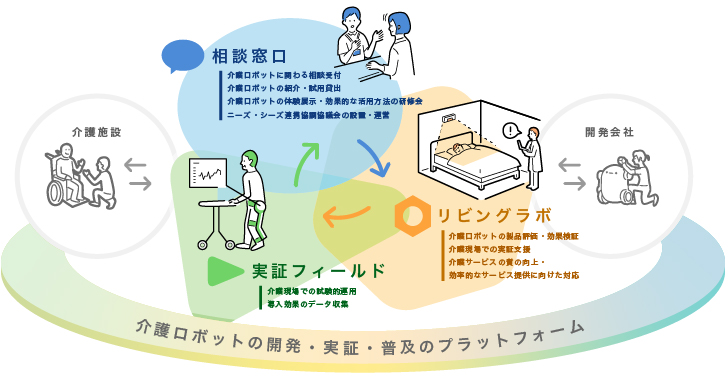
介護ロボットの評価・検証厚生労働省「介護ロボットの開発・実証・普及のプラットフォーム構築事業」(事務局:NTTデータ経営研究所)にリビングラボの1つとして参画しています。 生活空間を模擬・再現した実験環境を利用し、全国のリビングラボや相談窓口と連携しながら、企業により開発された介護ロボットの製品評価・効果検証、介護現場での実証支援等に取り組んでいます。
(柏リビングラボ紹介ページ)
(梶谷) ロボットをプローブとした生活の計測・分析・介入
ロボットをプローブとした生活の計測・分析・介入IoT化されたロボット介護機器を開発し、それを活用して生活を支援しながら、同時に高齢者の生活センシングのプローブ(探針)として利用し生活データを計測・蓄積する研究を行っています。データに基づきロボットを用いた適切な支援サービスを設計し、生活に介入しより良い支援サービスを提供することを目指しています。
 ロボット介護機器開発プロジェクト
ロボット介護機器開発プロジェクト「AMEDロボット介護機器開発・標準化事業」では経済産業省と厚生労働省によって策定された重点分野のロボット介護機器の開発・標準化の支援を行うことにより、被介護者の自立促進や介護者の負担軽減を実現し、ロボット介護機器の新たな市場の創出を目指しています。当グループは本事業の基準策定・標準化コンソーシアムの一員として事業を推進しています。
(介護ロボットポータルサイト) 高精度マーカ
高精度マーカ視覚マーカは,単眼のカメラで位置姿勢を簡易に計測できるツールです。我々は、マイクロレンズアレイを用いて「見る角度に応じてパターンが変化する視覚マーカ」を開発し、平面型マーカの分野で世界最高精度の位置姿勢推定を実現しました。現在は本マーカの実用化に向けた取り組みのほか、ロボット制御、計測、AR(拡張現実)等、幅広い分野への応用研究を進めています。
(田中)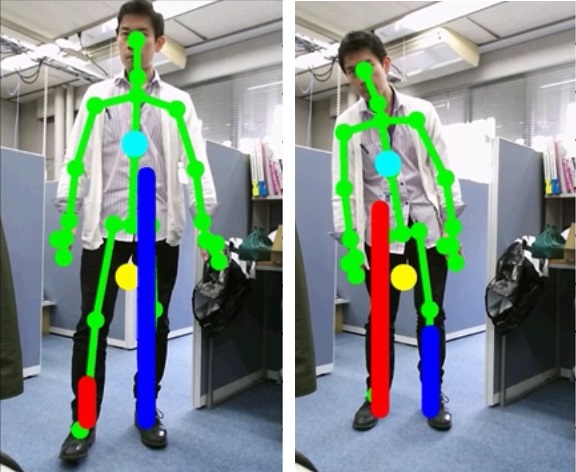 床反力の可視化
床反力の可視化障害者や高齢者の方々が歩行機能改善を行う上で、身体の力学情報をリアルタイムに理解することは重要です。そこで本研究ではKINECTなどの距離画像センサから取得した人の姿勢情報と動力学モデルを組み合せることで足裏に働く反力をリアルタイムに可視化する技術を開発しました。簡便に人の動きをデータ化し、それを直感的に学習者に提示することで、リハビリテーションの質の向上に貢献することを目指しています。
(尾形) 電動義手
電動義手障害者や高齢者の生活を支援する工学技術について幅広く研究しています。特に電動義手、重度障害者用操作インタフェース、高次脳機能障害者用作業支援ツールについて、先端技術を用いた開発だけにとどまらず、評価技術の開発も行っています。例えば、電動義手の操作負担の軽減のために環境因子との相互作用による操作フレームワークを構築したり、作業療法などで用いられる評価ツールの解析を行っています。
(梶谷)先端技術を用いて研究開発された工学技術は、その全てが製品化されて社会に定着するわけではありません。より多くの工学技術が社会の中で活用されるように、その社会実装過程における課題を調査したり、社会構造の解析とモデル化を行っています。そこでは、行動科学に基づく知見を活用したり、「情報」に関連する人の活動量を「情報コスト」と定義して解析を進めています。
(梶谷) 機能性ウェア
機能性ウェア衣服やウェアそのものがデバイスとして機能する「ウェアデバイス」を提言、その実現から作製方法に関して広く研究を行っています。ウェアデバイスとは、人間が着用できるように作製されたウェアラブルデバイスデバイスではなく、衣服そのものがセンサや電子回路の機能を持っているにもかかわらず、単なる「衣服」として着る、扱うことができ、かつ、生体の情報を取得することが可能な衣服としてのデバイスを目指しています。
(泉)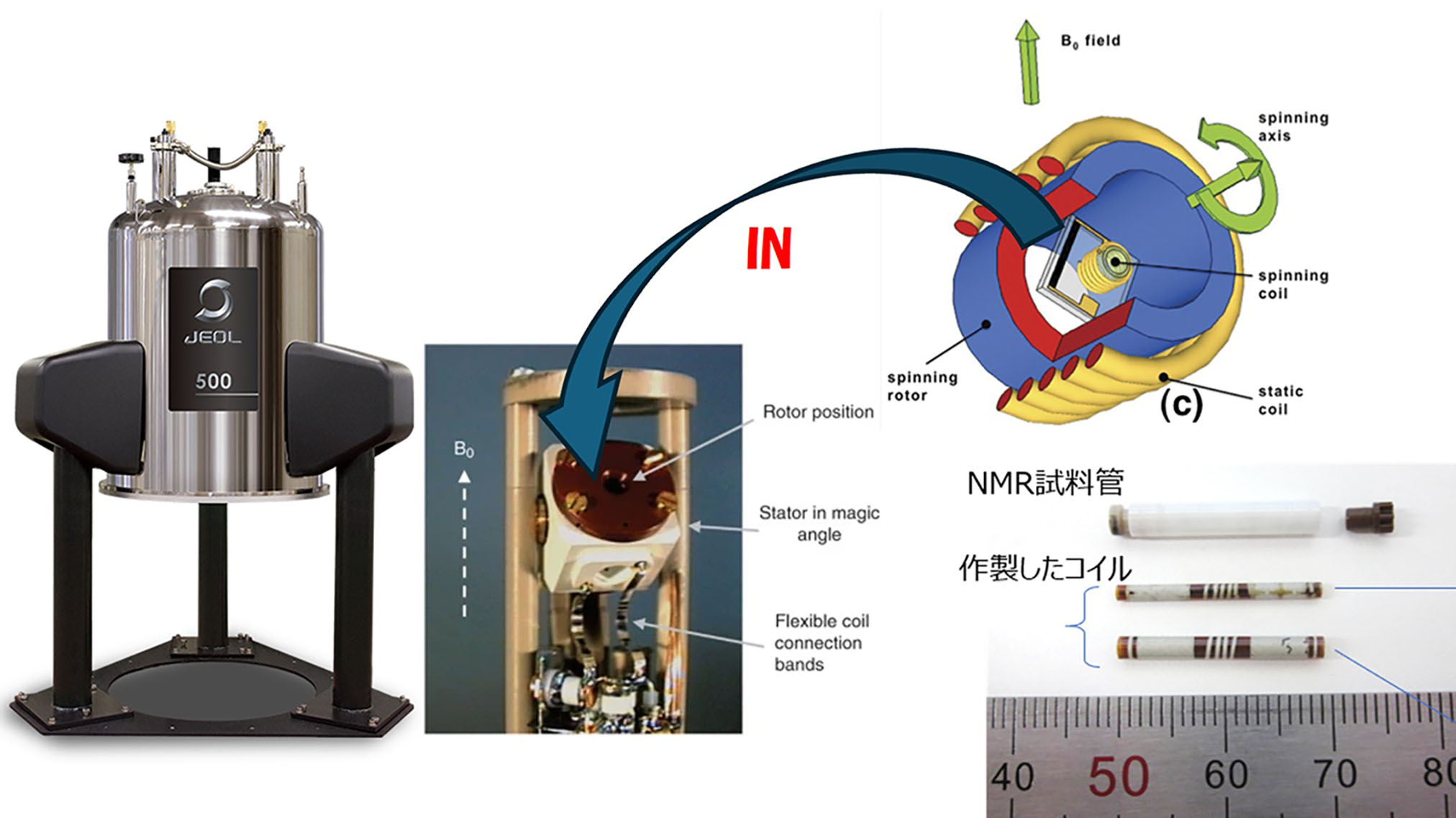 核磁気共鳴(NMR)装置の開発
核磁気共鳴(NMR)装置の開発材料開発に強い日本において、微小試料を非破壊で測定できる核磁気共鳴(NMR)は有用な測定手段です。強磁場設備が無くても微小試料のNMR測定感度を向上させるため、MACS (Magic Angle Coil Spinning)法を実現するべく、印刷技術を用いて内部コイルの作製手法と内部コイルを用いたNMR測定の感度向上のための研究を行っています。
(泉)
原著論文- Kunihiro Ogata, and Hideyuki Tanaka
Real-Time Self-Positioning with the Zero Moment Point Model and Enhanced Position Accuracy Using Fiducial Markers
MDPI Computers 2024, 13(12), 310, 25 Nov 2024. - Masayoshi Shinozaki, Daiki Saito, Keisuke Tomita, Taka-aki Nakada, Yukihiro Nomura & Toshiya Nakaguchi
Usability evaluation of a glove-type wearable device for efficient biometric collection during triage
Scientific Reports, vol.14, Article number: 9874 (2024), 30 Apr 2024. - 泉小波, 鶴岡利至, 牛島洋史
"ウェアデバイス実現のためのニットセンサ開発" 第38回エレクトロニクス実装学会春季講演大会論文集,
vol.38, pp.13-16, 14 Mar 2024. - 泉小波, 一刈良介, 三浦貴大, 鶴岡利至, 蔵田武志, 牛島洋史
"ウェアデバイス開発のためのニットセンサの作製条件による特性比較" 第33回マイクロエレクトロニクスシンポジウム論文集, vol.33, pp.333-336, 8 Sep 2023. - Jumpei Oba, Sumiko Yamamoto, Kengo Ohnishi, Isamu Kajitani, Yaeko Shibata, Koki Asai
"Effects of Single-handed and Dual-handed Tasks on Myoelectric Hand Prosthesis Operability of Unilateral Transradial Amputees"
Asian Journal of Occupational Therapy, vol.18, issue 1, pp.39-46, 26 Mar 2022. - Kunihiro Ogata and Yoshio Matsumoto
"Whole body sensing dummy of the elderly to evaluate robotic devices for nursing care"
Advanced Robotics, vol.35, issue 8, pp.504-515, 24 Feb 2021.
国際学会- J.Ohyama, M.Otsuki, H.Tanaka, K.Watanabe, S.Meguro, S.Miura, I.Hisanaga, K.Isoda, A.Matsuyama, M.Tanaka, S.Niida, N.Tojo, H.Kawanishi, Y.Miura, T.Miyake and M.Mochimaru
"Evaluation of a Concept of Developing Daily Experience Database Using Virtual Proof-of-Concept Experiment in Shopping Use Case"
ICAT-EGVE2024, 3 Dec 2024.
- Hideyuki Tanaka, Kunihiro Ogata,
LeagTag: An Elongated High-Accuracy Fiducial Marker for Tight Spaces
Proc.2024 IEEE Int. Conf. Robotics and Automation (ICRA) 17438-17444, May 2024.
- Hideyuki Tanaka, Kunihiro Ogata,
Fiducial Marker and Camera-Based Passive High-Accuracy 6-DoF Tracking for Mobile Objects
2023 5th International Conference on Control and Robotics (ICCR) 215-220, 23 Nov 2023.
- Kunihiro Ogata, Shusuke Kanazawa, Hideyuki Tanaka, Takeshi Kurata
"Basic Study of Upper Limb Movement Estimation and Function Evaluation including Shoulder Girdle by Multi-Sensing Flexible Sensor Wear"
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 23 Oct 2022.
- Hideyuki Tanaka
"Turning Any Object into an Input Device with a High-Accuracy Fiducial Marker"
2022 IEEE/SICE International Symposium on System Integration, 12 Jan 2022.
- Hideyuki Tanaka, Kunihiro Ogata
"A High-Accuracy Fiducial Marker with Parallel Lenticular Angle Gauges"
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 1 Oct 2021.
- Yasuko Kitajima, Isamu Kajitani, Mitsuhiro Nakamura, Keiko Homma , Yoshio Matsumoto and Jukai Maeda
"Verifying the Usefulness of Monitoring Sensors Used by Caregivers in Nursing Homes"
Digital Human Modeling and Applications in Health, Safety, Ergonomics and Risk Management. Posture, Motion and Health. HCII 2020.
Lecture Notes in Computer Science, vol 12198, pp.531-546, Jul 2020. - Isamu Kajitani, Keiko Homma and Yoshio Matsumoto
"Investigations on Monitoring Sensor Usage and Decision-Making: A Case Study in an Elderly Care Facility"
Digital Human Modeling and Applications in Health, Safety, Ergonomics and Risk Management. Posture, Motion and Health. HCII 2020.
Lecture Notes in Computer Science, vol 12198, pp.521-530, Jul 2020. - Hideyuki Tanaka
"Ultra-High-Accuracy Visual Marker for Indoor Precise Positioning"
Proc. The 2020 Int. Conf. Robotics and Automation (ICRA2020), pp.2338-2343, 2020. - Keiko Homma , Kiyoshi Fujiwara, Takuya Ogure and Isamu Kajitani
"Development of Contact Safety Test Procedure for Defecation Assistance Devices"
IEEE Global Conference on Life Sciences and Technologies, pp.153-156, Mar 2020. - Kunihiro Ogata and Yoshio Matsumoto
"Estimating Road Surface and Gradient using Internal Sensors for Robot Assist Walker"
2020 IEEE/SICE Int. Symp. on System Integration (SII2020), pp.826-831, Hawaii, USA, Jan 2020.
その他学会- 泉小波, 鶴岡利至, 牛島洋史
"ウェアデバイス実現のためのニットセンサ開発"
第38回エレクトロニクス実装学会春季講演大会
14 Mar 2024. - 田中秀幸, 尾形邦裕
"複数のARマーカを用いた移動体3次元追跡システム"
ロボティクス・メカトロニクス講演会 2023 (ROBOMECH2023)
28 Jun - 1 Juy 2023. - 伊藤渚, 梅村浩之, 尾形邦裕, 持丸正明
"遠隔での感情伝達を目的とした空気圧アクチュエータによる触覚提示デバイスの開発と評価"
ロボティクス・メカトロニクス講演会 2023 (ROBOMECH2023)
28 Jun - 1 Juy 2023. - 森裕紀, 野々山昭太, 尾形邦裕, 菅佑樹
"有機ミニトマト農場自動化ロボットTitanの開発"
ロボティクス・メカトロニクス講演会 2023 (ROBOMECH2023)
28 Jun - 1 Juy 2023. - 二渡寿樹, 尾形邦裕, 藤本雅大,今村由芽子, 松本吉央
"個人に適応した歩行支援が可能なモジュール型ロボットウェア"
ロボティクス・メカトロニクス講演会 2023 (ROBOMECH2023)
28 Jun - 1 Juy 2023. - 泉小波, 一刈良介, 三浦貴大,鶴岡利至, 蔵田武志, 牛島洋史
"ウェアデバイス開発のためのニットセンサの作製条件による特性比較"
第33回マイクロエレクトロニクスシンポジウム(MES2023)
8 Sep 2023. - 田中秀幸, 尾形邦裕
"首掛け型ウェアラブルデバイスを用いた測位と手指の動作認識"
第23回計測自動制御学会システムインテグレーション部門講演会(SI2022)
16 Dec 2022. - 泉小波, 堀典子, 鶴岡利至, 牛島洋史
"横編み機を用いたニットセンサによるウェアデバイスの研究"
第32回マイクロエレクトロニクスシンポジウム(MES2022)
7 Sep 2022. - 田中秀幸
"高精度マーカを用いた簡易動作計測"
第42回バイオメカニズム学術講演会
27 Nov 2021.
展示会- 田中秀幸, 山下樹里, 宮田なつき
"超微細印刷技術を用いた小型高精度ARマーカと手指動作計測への応用 "
第29回画像センシングシンポジウム, 14–16 Jun 2023. - 田中秀幸
"三次元地理空間情報を利用したロボット制御や人流解析 "
Interop Tokyo 2023, 14–16 Jun 2023. - 田中秀幸, 尾形邦裕
"首掛け型複合センサによる測位と作業計測"
Smart Sensing 2023, 31 May - 2 Jun 2023. - 田中秀幸, 尾形邦裕
"高精度マーカ:リアルとサイバーの接続点 "
MEMSセンシング&ネットワークシステム展 2023, 1–3 Feb 2023. - 田中秀幸
"高精度マーカによる測位"
G空間EXPO, 6–7 Dec 2022.
その他- ○高齢者住宅新聞(2023年5月24日)に 岡本招聘研究員の対談記事が掲載されました。
- ○「ロボット工学ハンドブック(第3版)」が出版されました(2023年3月15日)。
梶谷主任研究員が「Ⅱ-6.2.5 情報入力デバイス」の執筆を担当しています。
- ○AMED事業「ロボット介護機器開発等推進事業(環境整備)」の成果が公表されました。
ロボット介護機器臨床評価ガイダンス(国内展開企業向け)第一版(PDF)
ロボット介護機器臨床評価ガイダンス(国内展開企業向け)第一版の解説(PDF) - ○「事例で学ぶ 人を扱う工学研究の倫理~その研究、大丈夫?」が出版されました(2023年1月27日)。
梶谷主任研究員が著者の一人として執筆を担当しています。