Assistive Robotics Research Team
(Japanese/English)
- Photo
- Position, Name
 (+@aist.go.jp)Research field
(+@aist.go.jp)Research field 
-
Team leader
Hideyuki
TANAKAhideyuki-tanakaHigh accuracy visual marker, environmental structuring, robot vision, positioning
(Research topic 4) 
Senior researcher
Isamu
KAJITANIisamu.kajitani
-
Senior researcher
Mamoru
SEKIYAMAm.sekiyamaIoT, AAL, functional safety, standardization 
-
Senior researcher
Kunihiro
OGATAogata.kunihiro 
-
Senior researcher
Konami
IZUMI
izumi-kResearch on fabrication technology of "Wear Device" using flat knitting machines, and development of electric circuit and nuclear magnetic resonance device fabrication using various printing technology on 3D or curved surface -

-
Senior researcher
Yumeko
IMAMURAyumeko.imamuraAssistive technology and its biomechanical analysis -

-
Researcher
Masayoshi
SHINOZAKIshinozaki.masayoshiBiological characteristics measurement, Design and control of electronic circuits for measuring biological characteristics 
-
Invited Researcher
Shigeo
OKAMOTOshigeo.okamotoData utilization of medical, elderly care and healthcare information
(Research topic 3) 
-
Technical Staff
Daisuke
GOTOUgotou.daisukeNon-invasive measurement using wearable sensors 
-
Technical Staff
Toshiyuki
TSURUOKAtsuruoka-tKnit design for various flat knitting machines and knitting for functional knit fabric -
-
Technical Staff
Kenichi
TOSTUKAken.tostukaResearch and development of assistive devices and care robots -
-
Technical Staff
Akinori
IHARAa.ihara -
-
Technical Staff
Mika
OOSATOmika.oosato 
-
Technical Staff
Sachiko
TOBEtobe.sahiko -
-
Technical Staff
Naomi
TAKAHASHItakahashi.naomi -
-
Clerical Staff
Shizue
KIMURAkimura-sz
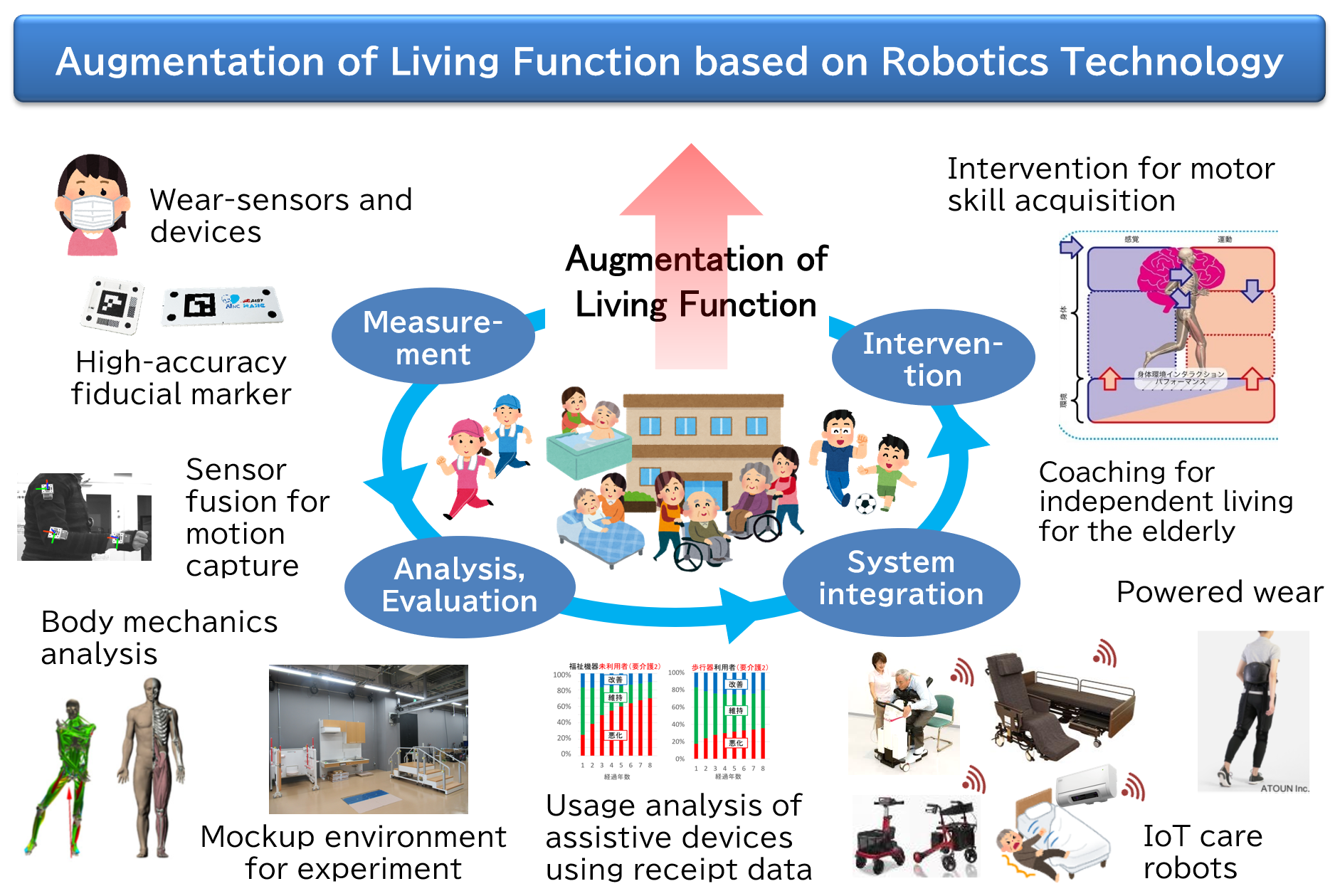
1. Evaluation and verification of nursing care robots
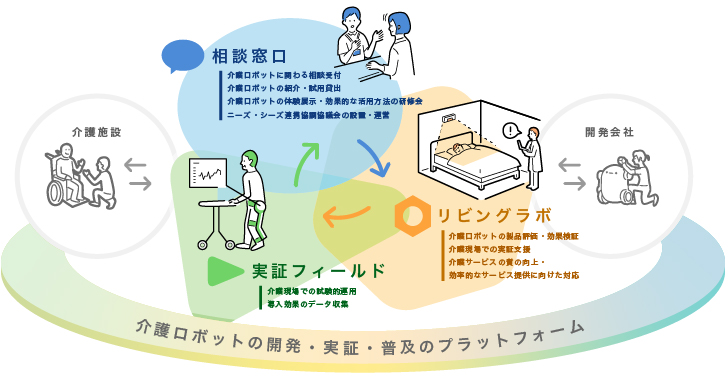
We are participating in the "Platform for the Development, Verification and Dissemination of Nursing Care Robots" project by the Ministry of Health, Labor and Welfare (secretariat: NTT DATA INSTITUTE OF MANAGEMENT CONSULTING, Inc.) as one of the Living Labs.
We are working on product evaluation and effectiveness verification of nursing care robots developed by companies, as well as support for demonstrations at nursing care sites, in collaboration with living laboratories and consultation services across the country,
using an experimental environment that simulates and reproduces living spaces.
(Kajitani)
2. Measuring, analyzing and intervening in life using robots as probes
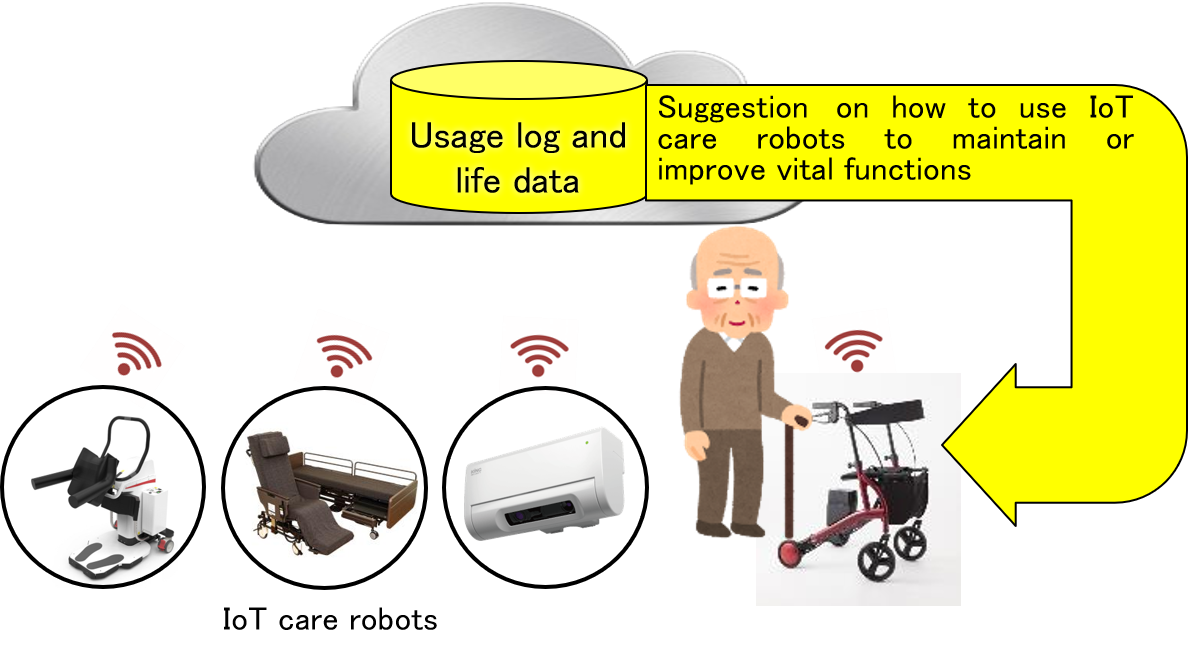
in life using robots as probes
We are developing a robotic nursing care device that is IoT-enabled, and using it to support life, we are also conducting research to measure and store life data by using it as a probe for living sensing of the elderly. We aim to design an appropriate support service using robots based on the data, and to intervene in our daily lives to provide better support services.
3. Development and standardization of robotic device for elderly care

In AMED Robot Care Project, we support the development of robotic devices for elderly care and its standardization in the prioritized areas determined by the Ministry of Economy, Trade and Industry (METI) and the Ministry of Health, Labor and Welfare (MHLW). The purposes of the project are (1) the promotion of independent living of the elderly, (2) the reduction of care burden on the caregiver, and (3) the achievement of higher productivities in care business, by creating a new market of useful robotic devices. Our team contribute the project as a member of the standardization consortium.
(Robot Care Project Website)
4. Visual markers for highly accurate position and attitude estimation

A visual marker is a tool for measuring position and attitude easily with a monocular camera. We have developed a visual marker whose pattern changes according to the viewing angle using a microlens array, and have achieved the world's most accurate estimation of position and attitude in the field of planar markers. We are currently working on the practical application of these markers, as well as applications in a wide range of fields such as robot control, measurement and augmented reality (AR).
(Tanaka)
5. Visualizing motion with images
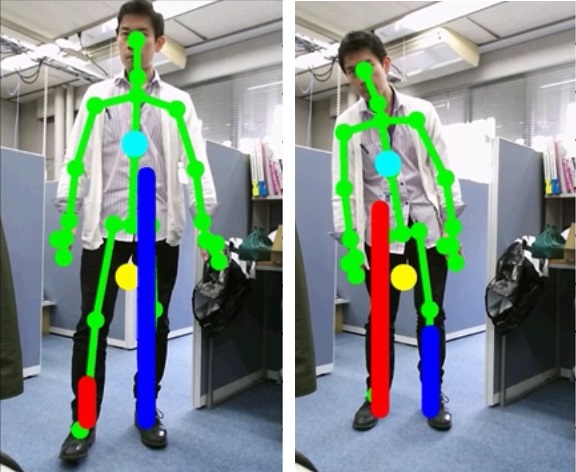
For the disabled and elderly people to improve their walking function, it is important to understand the mechanical information of the body in real time. Therefore, we have developed a technology to visualize the reaction force acting on the sole of the foot in real time by combining the human posture information obtained from a distance imaging sensor such as KINECT with a dynamic model. We aim to contribute to the improvement of the quality of rehabilitation by easily converting human movement into data and presenting it intuitively to learners.
(Ogata)
6. Research on assistive technology

We are conducting a wide range of research on engineering technologies to support the daily life of people with disabilities and elderly people. Examples include an evaluation tool for the user interface of powered prosthetic hands, a user interface for the people with severe disability, and the tools to support the people with higher brain dysfunction.
(Kajitani)
7. Research on social implementation
Not all of the engineering technologies that are researched and developed using advanced technologies are commercialized in society. For more engineering technologies to be used in society, we investigate issues in the process of their social implementation and analyze and model the social structure. We make use of findings based on behavioral science and define "information costs" as the amount of human activity related to "information" in our analysis.
(Kajitani)
- Kunihiro Ogata, and Hideyuki Tanaka
Real-Time Self-Positioning with the Zero Moment Point Model and Enhanced Position Accuracy Using Fiducial Markers
MDPI Computers 2024, 13(12), 310, 25 Nov 2024. - Masayoshi Shinozaki, Daiki Saito, Keisuke Tomita, Taka-aki Nakada, Yukihiro Nomura & Toshiya Nakaguchi
Usability evaluation of a glove-type wearable device for efficient biometric collection during triage
Scientific Reports, vol.14, Article number: 9874 (2024), 30 Apr 2024. - Jumpei Oba, Sumiko Yamamoto, Kengo Ohnishi, Isamu Kajitani, Yaeko Shibata, Koki Asai
"Effects of Single-handed and Dual-handed Tasks on Myoelectric Hand Prosthesis Operability of Unilateral Transradial Amputees"
Asian Journal of Occupational Therapy, vol.18, issue 1, pp.39-46, 26 Mar 2022. - Kunihiro Ogata and Yoshio Matsumoto
"Whole body sensing dummy of the elderly to evaluate robotic devices for nursing care"
Advanced Robotics, vol.35, issue 8, pp.504-515, 24 Feb 2021.
- J.Ohyama, M.Otsuki, H.Tanaka, K.Watanabe, S.Meguro, S.Miura, I.Hisanaga, K.Isoda, A.Matsuyama, M.Tanaka, S.Niida, N.Tojo, H.Kawanishi, Y.Miura, T.Miyake and M.Mochimaru
"Evaluation of a Concept of Developing Daily Experience Database Using Virtual Proof-of-Concept Experiment in Shopping Use Case"
ICAT-EGVE2024, 3 Dec 2024.
- Hideyuki Tanaka, Kunihiro Ogata,
LeagTag: An Elongated High-Accuracy Fiducial Marker for Tight Spaces
Proc.2024 IEEE Int. Conf. Robotics and Automation (ICRA) 17438-17444, May 2024.
- Hideyuki Tanaka, Kunihiro Ogata,
Fiducial Marker and Camera-Based Passive High-Accuracy 6-DoF Tracking for Mobile Objects
2023 5th International Conference on Control and Robotics (ICCR) 215-220, 23 Nov 2023.
- Kunihiro Ogata, Shusuke Kanazawa, Hideyuki Tanaka, Takeshi Kurata
"Basic Study of Upper Limb Movement Estimation and Function Evaluation including Shoulder Girdle by Multi-Sensing Flexible Sensor Wear"
2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 23 Oct 2022.
- Hideyuki Tanaka
"Turning Any Object into an Input Device with a High-Accuracy Fiducial Marker"
2022 IEEE/SICE International Symposium on System Integration, 12 Jan 2022.
- Hideyuki Tanaka, Kunihiro Ogata
"A High-Accuracy Fiducial Marker with Parallel Lenticular Angle Gauges"
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 1 Oct 2021.
- Yasuko Kitajima, Isamu Kajitani, Mitsuhiro Nakamura, Keiko Homma , Yoshio Matsumoto and Jukai Maeda
"Verifying the Usefulness of Monitoring Sensors Used by Caregivers in Nursing Homes"
Digital Human Modeling and Applications in Health, Safety, Ergonomics and Risk Management. Posture, Motion and Health. HCII 2020.
Lecture Notes in Computer Science, vol 12198, pp.531-546, Jul 2020. - Isamu Kajitani, Keiko Homma and Yoshio Matsumoto
"Investigations on Monitoring Sensor Usage and Decision-Making: A Case Study in an Elderly Care Facility"
Digital Human Modeling and Applications in Health, Safety, Ergonomics and Risk Management. Posture, Motion and Health. HCII 2020.
Lecture Notes in Computer Science, vol 12198, pp.521-530, Jul 2020. - Hideyuki Tanaka
"Ultra-High-Accuracy Visual Marker for Indoor Precise Positioning"
Proc. The 2020 Int. Conf. Robotics and Automation (ICRA2020), pp.2338-2343, 2020. - Keiko Homma , Kiyoshi Fujiwara, Takuya Ogure and Isamu Kajitani
"Development of Contact Safety Test Procedure for Defecation Assistance Devices"
IEEE Global Conference on Life Sciences and Technologies, pp.153-156, Mar 2020. - Kunihiro Ogata and Yoshio Matsumoto
"Estimating Road Surface and Gradient using Internal Sensors for Robot Assist Walker"
2020 IEEE/SICE Int. Symp. on System Integration (SII2020), pp.826-831, Hawaii, USA, Jan 2020.