 |
当研究室は筑波大学の連携大学院制度によって、産業技術総合研究所のAIST-CNRSロボット工学連携研究ラボ内に設置されている研究室です。当研究室では、人間工学的に不適切な姿勢での作業や重負荷作業、単純繰り返し作業、自然災害等によってダメージを受けたプラント等の有害・危険な環境での作業等、過酷環境で働く人間の活動を代替し解放するヒューマノイドロボットを実現するため、過酷環境でも働けるヘビーデューティーヒューマノイドロボットの実現に必要な基盤研究・工学的研究を行っています。具体的には、二足歩行ロボットに常に付きまとう問題である転倒に対し、転倒時の衝撃を受けても壊れにくい関節構造やエアバッグを用いた衝撃吸収機構、転倒時の衝撃を最小限に抑えるための動作制御技術、手足の区別なく全身を使って複雑な環境を移動するための動作計画・制御技術、複雑環境において周囲の環境の3次元計測を行って自己の状態を正確に推定し、計測結果から手や足をつける場所を認識する技術、多数の関節を持ち環境に固定されていないロボットを簡単な操作で遠隔操作したり新たな行動を教示したりする技術等の研究を行っています。研究室は産業技術総合研究所つくばセンター内にあり、HRP-2改を初めとした複数の等身大ヒューマノイドロボットを有し、このようなロボットを研究に使用することができる国内でも数少ない研究室の一つです。 |
 |
| Simultaneous localization and mapping(SLAM) in dynamic environment |
|
 |
|
|
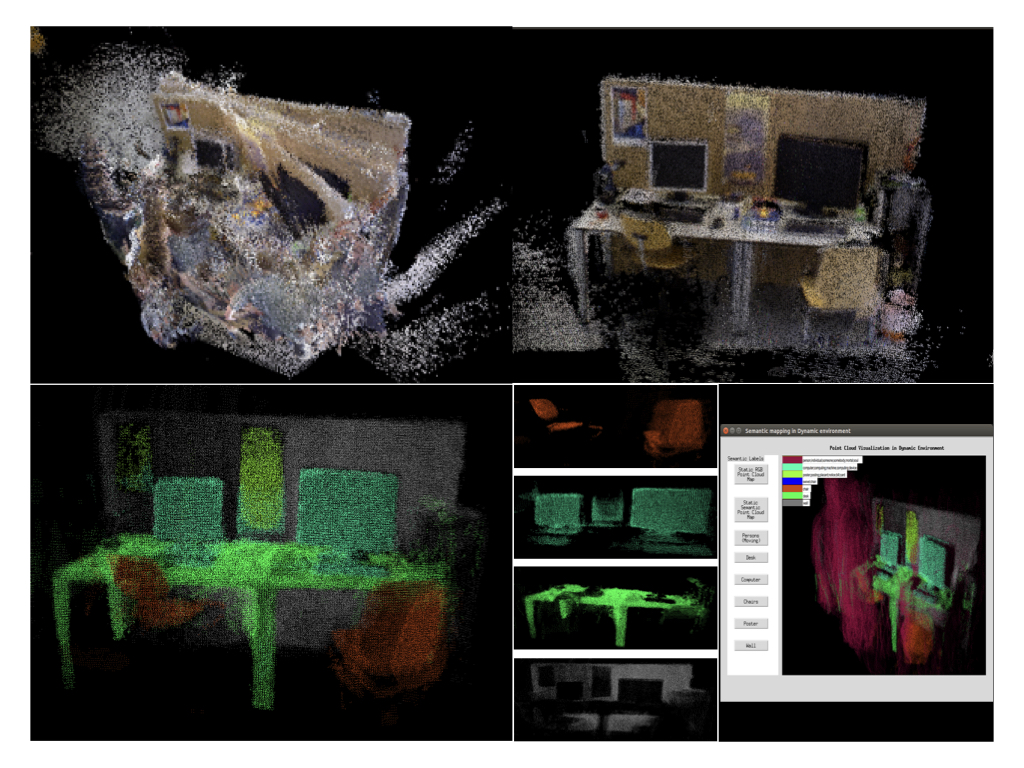
| Nowadays, SLAM in the dynamic environment has become a popular topic. This problem is called dynamic SLAM where many solutions have been proposed to segment out the dynamic objects that bring errors to camera tracking and subsequent 3D reconstruction. However, state-of-the-art dynamic SLAM methods face the problems of accuracy and speed, which is due to the fact that one segmentation algorithm cannot guarantee both points at the same time. We propose a multi-purpose dynamic SLAM framework to provide a variety of selections for segmentation, each has its applicable scene. Besides, if the user selects the semantic segmentation, the object-oriented semantic mapping is beneficial for high level robotic tasks. |
|
|
| 6-DoF Object Pose Estimation |
|
 |
|
|
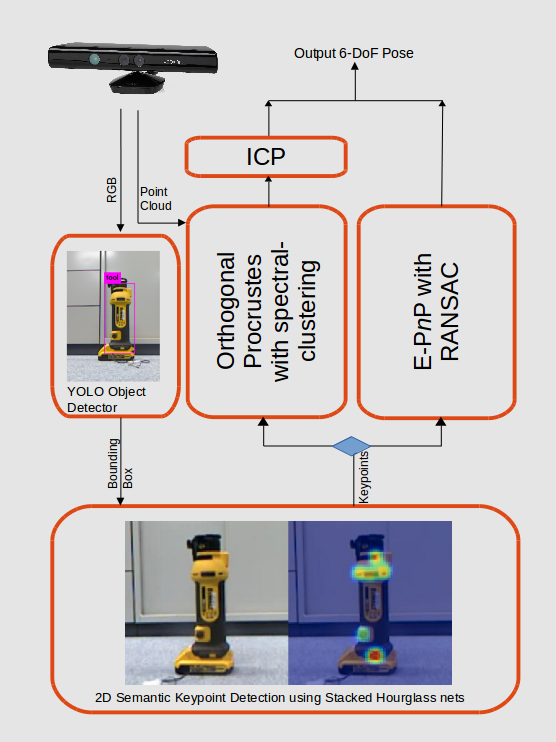
| For a humanoid robot to interact with objects in its surrounding environment, it is essential for the robot to find the position and orientation of the object relative to itself - often through the use of its vision sensors. The 3D position and roll, pitch, yaw rotation together comprise the 6 degrees-of-freedom pose of the object. For precise grasping and manipulation of tools, this pose needs to be estimated with a high degree of accuracy. Further, we desire robustness against challenging lighting conditions, occlusions, and non-availability of dense and accurate object models. This work mainly involves the use of Deep Learning based strategies for solving problems in this sphere.
|
|
|
構成メンバー
| 氏名 |
役職/学年 |
メールアドレス
_*_を@に変えて送信ください |
| 金広 文男 |
連携大学院教授 |
f-kanehiro_*_aist.go.jp |
| 孫 楽源 |
博士課程3年 |
son.leyuansun_*_aist.go.jp |
| Rohan Pratap Singh |
修士課程2年 |
rohan-singh_*_aist.go.jp |
| Xinchi Gao |
修士課程1年 |
|
| 屋宮 友哉 |
修士課程1年 |
|
連絡先
国立研究開発法人 産業技術総合研究所
情報・人間工学領域 AIST-CNRSロボット工学連携研究ラボ
[代表]
〒305-8560 茨城県つくば市梅園1-1-1 つくば中央第1(つくば本部・情報技術共同研究棟)
電話:029-861-9323 FAX:029-862-6507
メール:jrl-info-ml_*_aist.go.jp (_*_を@に変えて送信してください)