※2022年11月25日:都合によりAIST歩行データベース2019の公開を一時中止しています。
2019年版の公開について
産総研では,これまで2013年と2015年に、モーションキャプチャシステムと床反力計で計測した歩行データの一部を公開してまいりました。まずAIST歩行データベース2013では139名の健常成人の歩行データを1歩行周期分ずつ公開しました。次にAIST歩行データベース2015では214名の健常成人の歩行データを5歩行周期分ずつ公開しました。しかしこれらのデータはすべて右足の踵接地から始まる一歩行周期分のデータであり、例えば歩行の左右差について言及することはできませんでした。そこで今回AIST歩行データベース2019として300名の健常成人の歩行データを10歩行周期分(左右それぞれ5歩行周期分)公開いたします。
更新履歴
- 2019/11/1:AIST歩行データベース2019 公開
- 2020/2/4:(4)モデルと座標系 における記載ミスを修正しました
- 2020/3/12:英語版歩行データベース2019英語版サイトをオープンしました
- 2020/12/1:お問い合わせ先が変更となりました
- 2021/2/26:骨格モデルの間違いを修正しました
このデータについて
- (1)はじめに
- (2)計測環境・計測機器
- (3)マーカセット
- (4)モデルと座標系
- (5)CMOファイル
- (6)Visual3D Readerの使い方
- (7)歩行データベース諸元
- (8)個人情報の取り扱い
- (9)引用
- (10)お問い合わせ・データ入手について
(1)はじめに
本資料では本データベースのデータを使用するために、各歩行データの詳細および可視化ソフトVisual3D Reader(以下Visual3Dと記す)について説明を行います。
(2)計測環境・計測機器
本データベースに登録されている歩行データは,図1のように、モーションキャプチャシステム(Vicon社製Vicon MXシステム・Vicon Nexus)と床反力計(AMTI社製BP400600-1000及びBP400600-2000)を用いて計測した。サンプリング周波数は、モーションキャプチャシステムが200Hz、床反力計が1000Hzとした。被験者には、計測着(スパッツ・ノースリーブシャツあるいは上半身裸)を着用させ、初めに基準姿勢(直立姿勢)を計測した。その後裸足にて歩行計測を行った。この時被験者には、「日常でいつも歩いているように真っ直ぐ歩いて下さい」と指示し、床反力計の設置しているエリアを中心に約10mを歩かせた。数回の練習試行の後、計測試行数は右足から床反力計に入る場合を5試行、左足から床反力計に入る場合を5試行の計10試行分を計測しデータベースに登録した。マーカ位置と着力点位置には6Hzの、床反力データには10Hzのローパスバターワースフィルタ処理を施し、高周波ノイズを除去している。なお本計測は国立研究開発法人産業技術総合研究所内の人間工学実験委員会の承認を得て行った。

データ計測で使用したモーションキャプチャシステムと床反力計のイメージ
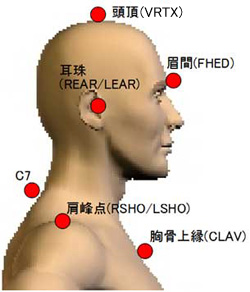
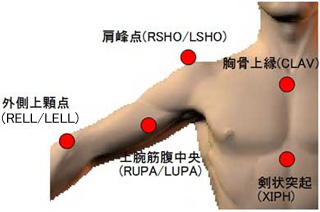
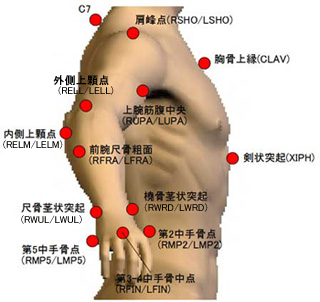
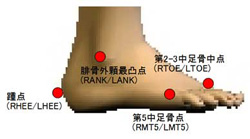
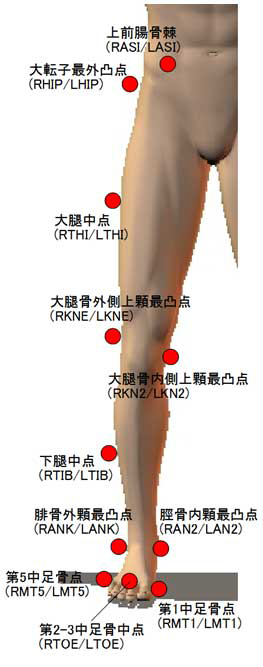
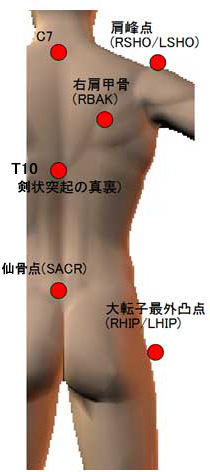
(3)マーカセット
歩行データを計測する際に用いたマーカセットは次のとおりである。なおデータの計測時期によっていくつかのマーカが追加されてきた。しかし各節を定義するために必要な基準マーカは変更されていない。
 |
 |
 |
 |
 |
 |
(4)モデルと座標系
ここでは、各データで運動学的・運動力学的な解析を行うためのモデルと座標系について解説する。
4.1 骨盤
骨盤は,Davis et. (1991) に基づき、仙骨点及び左右の上前腸骨棘で定義した。
原点:左右の上前腸骨棘の中点.
x軸:原点から上前腸骨棘を通るベクトル
z軸:原点から仙骨点を通る軸とx軸の外積ベクトル
y軸:x軸とz軸の外積ベクトル
[参考]Davis RB, Ounpuu S, Tyburski D, Gage JR. (1991) "A
Gait Analysis Data Collection and Reduction Technique." Human Movement
Science, 10: 575-587.
Visual3Dの解説サイト:http://c-motion.com/v3dwiki/index.php?title=Helen_Hayes_(Davis)_Pelvis
4.2 下肢節の座標系
大腿部,下腿部,及び足部は,次のように座標系を定義している。
大腿部:
遠位端:大腿骨外側上顆最凸点と大腿骨内側上顆最凸点の中点
近位端(原点):股関節点(4.1で位置が求められている)
座標軸:
z軸:遠位端から近位端を通るベクトル
y軸:大腿骨外側上顆最凸点と大腿骨内側上顆最凸点を通る軸と,z軸の外積ベクトル
x軸:z軸とy軸の外積ベクトル
下腿部:
遠位端:腓骨外顆最凸点と脛骨内顆最凸点の中点
近位端(原点):大腿骨外側上顆最凸点と大腿骨内側上顆最凸点の中点
座標軸:
z軸:遠位端から近位端を通るベクトル
y軸:大腿骨外側上顆最凸点と大腿骨内側上顆最凸点を通る軸とz軸の外積ベクトル
x軸:z軸とy軸の外積ベクトル
足部:
遠位端:第1中足骨点と第5中足骨点の中点
近位端(原点):腓骨外顆最凸点と脛骨内顆最凸点の中点
座標軸:
z軸:遠位端から近位端を通るベクトル
y軸:腓骨外顆最凸点と脛骨内顆最凸点を通る軸とz軸の外積ベクトル
x軸: z軸とy軸の外積ベクトル
Visual3Dの解説サイト: http://www.c-motion.com/v3dwiki/index.php?title=Segments
重心位置や節質量などの定義については、Visual3D Readerから[Model Viewer]タブを選択し、リストに掲載されている各節の名前をダブルクリックすると、マーカからどのように各節を定義したかがわかる。
4.3 上体のモデル化
上体のモデルも下肢節と同様にモデル化されるが、近位端や遠位端をどのように定義するのかが問題となる。本データベース作成においては、Golem Upperbody Modelを用いている。詳細はVisual3DのWikiを参照されたい。
Visual3Dの解説サイト: http://c-motion.com/v3dwiki/index.php?title=Tutorial:_Golem_Upperbody_Model_Delete
4.4 モデルの関節自由度
本データベースでは、各関節ともに3自由度を持つと定義した。
4.5 関節角度の定義
各関節角度は骨盤を基準にして、近位節から見た遠位節の3次元相対角度として表している。この時 x軸が屈伸(前後屈)、y軸が内外転(左右側屈)、z軸が内外旋(左右回旋)を表している。このような定義であるため、足関節は立位時の姿勢が0度ではないことに注意されたい。すなわち下腿節から見た足部節については、立位姿勢で常に60度程度背屈した角度として算出されている。
3次元角度の回転の順番はカルダン角の定義に従い、x(屈伸)→y(内外転)→z(内外旋)の順になっている。ただし本DBでは、この順番で肩関節周りの関節角度を記述すると、被験者によっては角度計算で不具合が生じることを確認している。これは上腕のx軸座標が肘のランドマークに沿って計算され、歩行時には上腕骨が90度以上回旋する被験者がいるために、数値計算上象限を間違えてしまうためである。この現象の改善策として、簡単には回転順番を見直すことで改善されるが、本DBではあえて他の関節角度データと合わせるためこのままにしてある。
4.6 骨盤角度の定義
骨盤角度は実験室座標系における角度として計算しているため、被験者の進行方向によってz軸周りの角度が正しく計算されない。そのためそれぞれの進行方向に対応したPelvisAnglePositiveおよびPelvisAngleNegativgeという2つの骨盤角度を計算しているので適宜使い分けていただきたい。
4.7 関節モーメントの定義
関節モーメントも関節角度と同じ定義を用いている。すなわち、骨盤を中心に近位節座標系で記述された遠位関節の関節モーメントとして記録されている。なお本DBでは床反力データが正確に計測されているのは、踵接地から1周期後の踵接地までであることに注意されたい。本DBでは反対側下肢や腰部のモーメントも計算されているが、踵接地直後の反対側の足部の床反力データは計測されていないケースもあるため、踵接地直後の反対側下肢および腰部の関節モーメントは正確ではない可能性がある点を留意いただきたい。
4.8 床反力データの表記
4.7節で示したように、床反力データは踵接地から1周期後の踵接地まで計測されており、その間の反対側の踵接地時の床反力データも計測されている。4.6節の骨盤の角度定義の際の定義と同じく、歩行中の被験者の右側を計測空間のx軸の正方向、地面に鉛直な方向を計測空間のz軸の正方向として、床反力データおよび着力点位置データを表記している。
4.9 関節消費パワーの定義
関節消費パワーは関節角速度と関節モーメントの積で表される。本DBでは近位節座標系で計算された遠位関節軸まわりのそれぞれの消費パワーを算出した。関節消費パワーが正の値の時はコンセントリックな筋活動を表しており、負の値の時はエキセントリックな筋活動を表している。
(5)CMOファイル
被験者ごとに1つのCMOファイルが作成されている。CMOファイルの中身は基準姿勢データと歩行データの2つで構成されており、いずれも産総研内のViconシステムを用いて計測したものである。
ファイル名に被験者の属性が記載されている。ファイル名の形式は下記の通り。
例1)0001_01_F_70_152_46.CMO
例2)0009_01_M_69_163_51.CMO
- 1~4文字目:ID
- 6~7文字目:繰り返し番号
- 9文字目:性別(M:男性/F:女性)
- 11~12文字目:年齢
- 14~16文字目:身長(cm)
- 18~19文字目:体重(kg)
各被験者のデータには、右足から床反力計に入った一歩行周期分のデータを5試行、左足から床反力計に入った一歩行周期分のデータを5試行が登録されている。またCMOファイルは基本的には連番で作成しているが、マーカの欠損など何らかの事情で10試行分のデータが揃わなかったものについては欠番とした。
(6)Visual3D Readerの使い方
手順0
Visual3D ReaderはC-motion社が無料で公開しているCMOファイルのビューアである。現在はFree CMO Readerという名称で下記よりダウンロードできる。インストールすると名称は「Visual3D Free Reader(バージョン名)」となる。本項の説明では便宜上「Visual3D Reader」という名称を使用する。
https://c-motion.com/tools.php
手順1
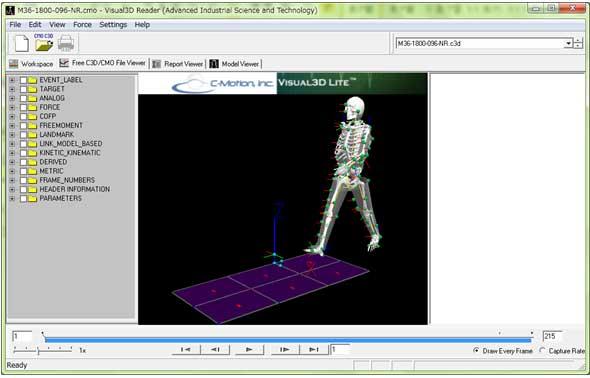
Visual3D Readerを起動する。起動すると下図のようなウィンドウが表示される。
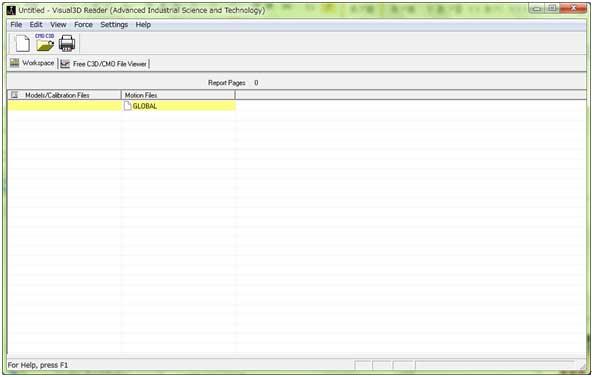
手順2
[File]→[Open/Add]でファイル選択ダイアログが開くので、見たいCMOファイルを選択する。

手順3
Motion Files下のc3dファイルをダブルクリックすると、アニメーションビューワー画面に遷移する。
グラフィック画面内では、マウスボタンを押しながら動かすことで回転や拡大縮小ができる。
- 左クリックしたままマウスを動かす→回転
- 右クリックしたままマウスを動かす→拡大縮小
- 左右クリックしたままマウスを動かす→並進移動
下の>ボタンなどでアニメーションを動かすことができる。
手順4
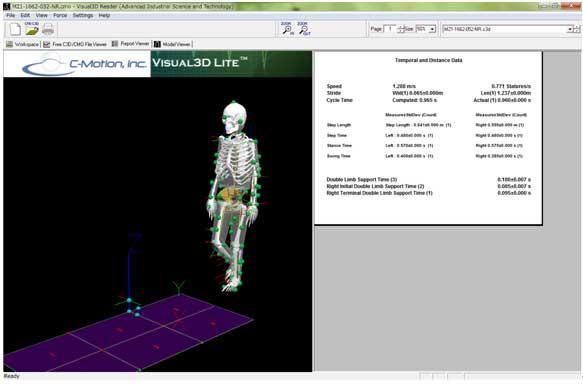
Report Viewerタブを選ぶと、被験者の歩行時の情報を見ることができる。
- 1ページ:時間因子(歩行周期など)・距離因子(歩幅など)
- 2ページ:床反力データ・着力点位置データ
- 3ページ:下半身関節角度データ・骨盤角度データ
- 4ページ:上半身関節角度データ
- 5ページ:下肢関節モーメントデータ
- 6ページ:下肢関節モーメントデータ
手順5
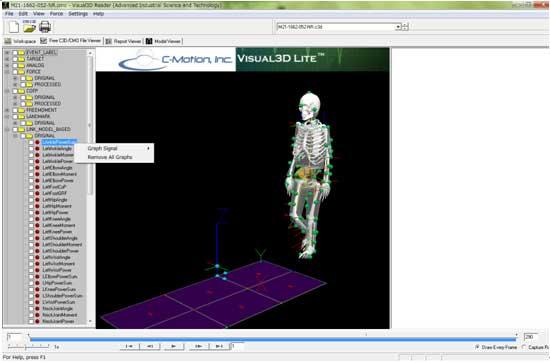
[Free C3D/CMO File Viewer]タブを選び左側にあるフォルダ列をクリックすると、様々な情報を見ることができる。フォルダ列の中のそれぞれの情報を右クリックするとグラフを記述することができ、また左クリックするとフローウィンドウで値を表示し、さらにはテキストデータとして出力することができる。
- EVENT_LABEL:歩行イベント(踵接地・つま先離地など)
- TARGET:マーカ位置
- Original:計測生データ
- PROCESSED:フィルタ処理後(6Hzローパスフィルタ)
- ANALOG:床反力の各センサの出力情報(一般には使用しない)
- FORCE::床反力ごとの床反力データ
- Original:計測データ
- PROCESSED:フィルタ処理後(10Hzローパスフィルタ)
- COFP::床反力ごとの着力点位置力データ
- Original:計測データ
- PROCESSED:フィルタ処理後(6Hzローパスフィルタ)
- FREEMOMENT:床反力ごとのモーメントデータ(一般には使用しない)
- LANDMARK:マーカ位置を使って定義した空間内での仮想マーカ位置、例えば関節点など.
- LINK_MODEL_BASED:関節モーメント・関節角度などの計算データ
- KINETIC_KINEMATIC:各節ごとの運動学・運動力学情報(一般には使用しない)
- DERIVED:各節ごとの軸周りの回転情報(一般には使用しない)
- METRIC:被験者の身長や体重、データ正規化のための情報など
- FRAME_NUMBERS:時間情報(一般には使用しない)
※右上のダイアログがファイル名になっていることを確認のこと。ここがGLOBALやALL_FILESになっていると左クリックができなくなる。ファイル名になっていない場合は、ファイアログをクリックしてファイル名を選ぶ。
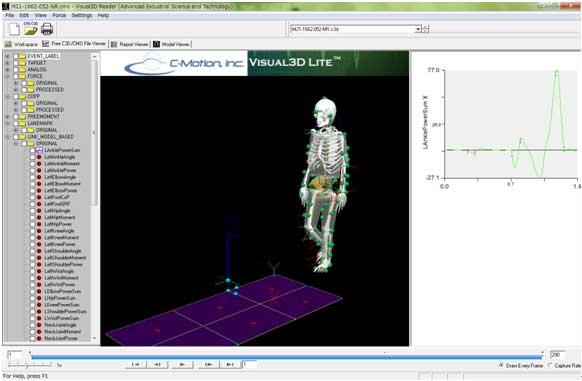
右クリック時:右端のエリアにグラフを記述することができる。
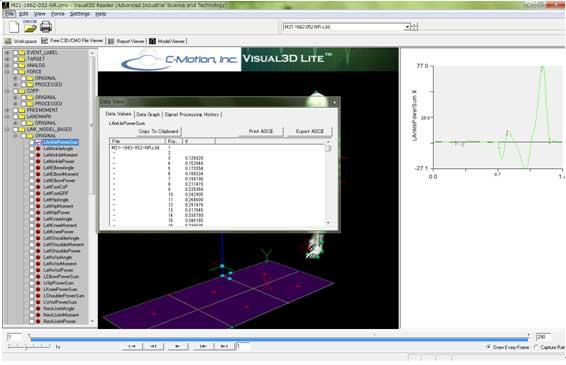
左クリック時:[Export ASCII]でそのデータをテキストに書き出すことができる。
(7)歩行データベース諸元
- 保存フォルダ:\2019_DHRC_GaitDatabase_Original\CMO
- 男性:150名(20歳~77歳)
- 女性:150名(20歳~78歳)
- 身長:138cm~185cm
- 体重:34kg~105kg
- ファイルサイズ:7.60 GB / ファイル数:300 ファイル
(8)個人情報の取り扱い
今回公開するデータベースの特徴は集団全体の統計データではなく、計測にご協力いただいた被験者の方々の個別データを公開するところにあります。個別データの公開については被験者の方々全員に同意を得ております。
(9)引用
本データを引用する際は、下記のように引用して下さい。
- 【和文】小林吉之,肥田直人,中嶋香奈子,藤本雅大,持丸正明,2019:AIST歩行データベース2019.
https://unit.aist.go.jp/harc/ExPART/GDB2019.html - 【英文】Yoshiyuki Kobayashi, Naoto Hida, Kanako Nakajima, Masahiro Fujimoto, Masaaki Mochimaru, 2019: AIST Gait Database 2019.
https://unit.aist.go.jp/harc/ExPART/GDB2019.html
(10)お問い合わせ・データ入手
※2022年11月25日:現在データベースの公開を一時中止しています。入手を希望される方は下記のとおりご記載のうえ、公開データ担当メールアドレスまでご連絡ください。折り返し提供にあたってご提出をお願いしているアンケートおよび使用同意書フォームをお送りいたします。
- ・お名前
- ・ご所属(法人名・部署名 もしくは大学名・学部名 など)
- ・連絡先メールアドレス
- ・該当データベースの名称(本データベースの場合は「AIST歩行データベース2019」)
- ・使用目的(差支えない範囲で結構です)
国立研究開発法人 産業技術総合研究所
AIST歩行データベース 公開データ担当
harc-liaison-ml@aist.go.jp