Sensor-independent Pedestrian Detection for Personal Mobility Vehicles in Walking Space Using Dataset Generated by Simulation
Takahiro Shimizu, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Motoki Shino
25th International Conference on Pattern Recognition (ICPR2020), 2020
Abstract
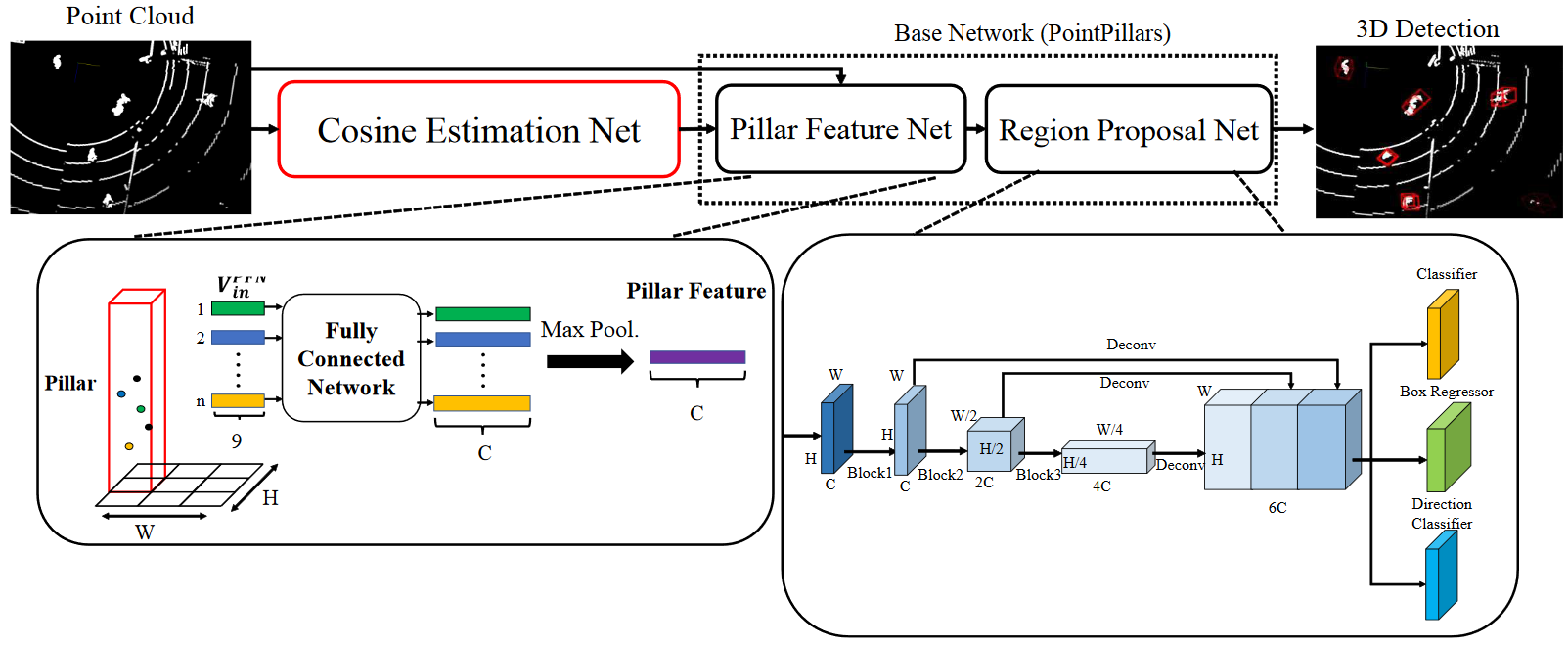
Autonomous driving of a personal mobility vehicle such as a wheelchair in a walking space is crucial in the future as a means of transportation for the elderly and the physically handicapped. To realize this, accurate pedestrian detection is indispensable. As existing 3D object detection methods are trained with a roadway dataset, they are widely used for object detection in roadways. These methods have two major drawbacks as regards the detection of objects in walking spaces. The first is that they are largely depend on the different LIDAR models. To eliminate this issue, we propose a 3D object detection method, CosPointPillars, that does not take the reflection intensities of the LIDAR point cloud, which causes a sensor model dependency, as input. The second drawback is that networks trained with a roadway dataset cannot sufficiently detect pedestrians (whoare major traffic participants in walking spaces) located within a short distance; this is because the roadway dataset hardly includes nearby pedestrians. To solve this issue, we generated a new walking space dataset called SimDataset, which includes nearby pedestrians as a training dataset in the simulations. An experiment on a real walking space showed that SimDataset is suitable for use in pedestrian detection.
Paper
Sensor-independent Pedestrian Detection for Personal Mobility Vehicles in Walking Space Using Dataset Generated by Simulation
Takahiro Shimizu, Kenji Koide, Shuji Oishi, Masashi Yokozuka, Atsuhiko Banno, Motoki Shino
25th International Conference on Pattern Recognition (ICPR2020), 2020
pdf
doi